4. 在“探究弹力和弹簧伸长的关系,并测定弹簧的劲度系数”的实验中,实验装置如图实-3-8.所用的每个钩码的重力相当于对弹簧提供了向右恒定的拉力.实验时先测出不挂钩码时弹簧的自然长度,再将5个钩码逐个挂在绳子的下端,每次测出相应的弹簧总长度. 图实-3-8
在“探究弹力和弹簧伸长的关系,并测定弹簧的劲度系数”的实验中,实验装置如图实-3-8.所用的每个钩码的重力相当于对弹簧提供了向右恒定的拉力.实验时先测出不挂钩码时弹簧的自然长度,再将5个钩码逐个挂在绳子的下端,每次测出相应的弹簧总长度. 图实-3-8
(1)有一个同学通过以上实验测量后把6组数据描点在坐标图实-3-9中,请作出F-L图线.
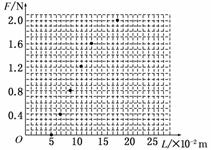
图实-3-9
(2)由此图线可得出该弹簧的原长L0=________ cm,劲度系数k=________ N/m.
(3)试根据以上该同学的实验情况,请你帮助他设计一个记录实验数据的表格(不必填写其实验测得的具体数据)
(4)该同学实验时,把弹簧水平放置与弹簧悬挂放置相比较.
优点在于:______________________________________________________________.
缺点在于:_______________________________________________________________.
解析:(1)用平滑的曲线将各点连接起来,如图所示:
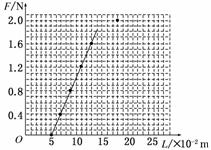
(2)弹簧的原长L0即为弹力为零时弹簧的长度,由图象可知,L0=5×10-2 m=5 cm.
劲度系数为图象直线部分的斜率,k=20 N/m.
(3)记录数据的表格如下表:
|
次数 |
1 |
2 |
3 |
4 |
5 |
6 |
|
弹力F/N |
|
|
|
|
|
|
|
弹簧的长度L/×10-2 m |
|
|
|
|
|
|
(4)优点是:避免弹簧自身所受重力对实验的影响;
缺点是:弹簧与桌面及绳子与滑轮间存在的摩擦造成实验的误差.
答案:(1)见解析 (2)5 20 (3)(4)见解析
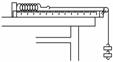
3. (2011·南通模拟)某同学用如图实-3-6所示装置做探究弹力和弹簧伸长关系的实验.他先测出不挂砝码时弹簧下端指针所指的标尺刻度,然后在弹簧下端挂上砝码,并逐个增加砝码,测出指针所指的标 图实-3-6
(2011·南通模拟)某同学用如图实-3-6所示装置做探究弹力和弹簧伸长关系的实验.他先测出不挂砝码时弹簧下端指针所指的标尺刻度,然后在弹簧下端挂上砝码,并逐个增加砝码,测出指针所指的标 图实-3-6
尺刻度,所得数据列表如下:(重力加速度g=9.8 m/s2)
|
砝码质量m/102 g |
标尺刻度为x/10-2m |
|
0 |
15.00 |
|
1.00 |
18.94 |
|
2.00 |
22.82 |
|
3.00 |
26.78 |
|
4.00 |
30.66 |
|
5.00 |
34.60 |
|
6.00 |
42.00 |
|
7.00 |
54.50 |
(1)根据所测数据,在如图实-3-7坐标纸上作出弹簧指针所指的标尺刻度x与砝码质量m的关系曲线.
图实-3-7
(2)根据所测得的数据和关系曲线可以判断,在______N范围内弹力大小与弹簧伸长关系满足胡克定律.这种规格弹簧的劲度系数为________N/m.
解析:(1)根据表中数据描点,按照各点的分布走向,作出如图所示的图象.
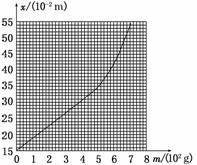
(2)从描点得到的图象看,当砝码超过500 g后,开始弯曲,即超过了弹性限度,在这之前才满足胡克定律.
F=0.5 kg×9.8 m/s2=4.9 N
所以在0-4.9 N内满足胡克定律.
根据图线的物理意义需要换算单位,很麻烦,我们就从弹力为F=4.9 N时,弹簧的伸长量Δx=(34.60-15.00)×10-2 m,得k===25.0 N/m.
答案:(1)见解析 (2)0-4.9 25.0

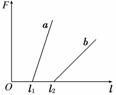 一个实验小组在“探究弹力和弹簧伸长的关系”的实验中,使用两条不同的轻质弹簧a和b,得到弹力与弹簧长度关系的图象如图实-3-4所示.下列表述正确的是( )
一个实验小组在“探究弹力和弹簧伸长的关系”的实验中,使用两条不同的轻质弹簧a和b,得到弹力与弹簧长度关系的图象如图实-3-4所示.下列表述正确的是( )
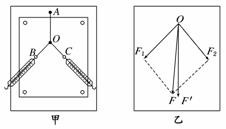
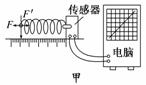
5.如图实-2-6所示,某小组同学利用DIS实验装置研究支架上力的分解.A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负.A连接质量不计的细绳,可沿固定的板做圆弧形移动.B固定不动,通过光滑铰链连接长0.3 m的杆.将细绳连接在杆右端O点构成支架.保持杆在水平方向,按如下步骤操作:
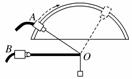
图实-2-6
①测量绳子与水平杆的夹角∠AOB=θ
②对两个传感器进行调零
③用另一绳在O点悬挂一个钩码,记录两个传感器读数
④取下钩码,移动传感器A改变θ角
重复上述实验步骤,得到表格.
|
F1 |
1.001 |
0.580 |
… |
1.002 |
… |
|
F2 |
-0.868 |
-0.291 |
… |
0.865 |
… |
|
θ |
30° |
60° |
… |
150° |
… |
(1)根据表格A传感器对应的是表中力________(选填“F1”或“F2”).钩码质量为________ kg(保留1位有效数字).
(2)本实验中多次对传感器进行调零,对此操作说明正确的是( )
A.因为事先忘记调零
B.何时调零对实验结果没有影响
C.为了消除横杆自身重力对结果的影响
D.可以完全消除实验的误差
解析:(1)A传感器中的力均为正值,故A传感器对应的是表中力F1,平衡时,mg=F1sinθ,当θ=30°时,F1=1.001 N,可求得m=0.05 kg.
(2)在挂钩码之前,对传感器进行调零,目的是为了消除横杆自身重力对结果的影响,故C正确.
答案:(1)F1 0.05 (2)C