13.已知万有引力恒量G,根据下列哪组数据可以计算出地球的质量( )
| A. | 卫星距离地面的高度和其运行的周期 | |
| B. | 月球自转的周期和月球的半径 | |
| C. | 地球表面的重力加速度和地球半径 | |
| D. | 地球公转的周期和日地之间的距离 |
12.如图甲所示,质量为m=1kg的小物块放在长直水平面上,用水平细线紧绕在半径为R=0.2m、质量为M=1kg的薄壁圆筒上.t=0时刻,圆筒在电动机带动下由静止开始绕竖直中心轴转动,小物块的v-t图象如图乙,物块和地面之间的动摩擦因数为μ=0.2.则( )

| A. | 圆筒转动的角速度满足ω=5t | B. | 细线的拉力大小为2 N | ||
| C. | 细线拉力的瞬时功率满足P=4t | D. | 在0∽2 s内,电动机做的功为8J |
11. 如图所示,虚线a、b、c代表电场中的三个等势面,相邻等势面之间的电势差相等,即Uab=Ubc,实线为一带负电的质点仅在电场力作用下通过该区域时的运动轨迹,P、R、Q是这条轨迹上的三点,R点在等势面b上,据此可知( )
如图所示,虚线a、b、c代表电场中的三个等势面,相邻等势面之间的电势差相等,即Uab=Ubc,实线为一带负电的质点仅在电场力作用下通过该区域时的运动轨迹,P、R、Q是这条轨迹上的三点,R点在等势面b上,据此可知( )
如图所示,虚线a、b、c代表电场中的三个等势面,相邻等势面之间的电势差相等,即Uab=Ubc,实线为一带负电的质点仅在电场力作用下通过该区域时的运动轨迹,P、R、Q是这条轨迹上的三点,R点在等势面b上,据此可知( )| A. | 带电质点在P点的加速度比在Q点的加速度小 | |
| B. | 带电质点在P点的电势能比在Q点的小 | |
| C. | 带电质点在P点的动能大于在Q点的动能 | |
| D. | 三个等势面中,c的电势最高 |
10.随着我国探月三步走计划的实现,将来有一天你会成功登上月球.如果你在月球上用手竖直向上抛出一个小铁球,由下列已知条件能求出你对小铁球所做功的是( )
| A. | 卫星绕月球运动的周期T和轨道半径r及小铁球的质量 | |
| B. | 卫星绕月球运动的线速度v和轨道半径r及小铁球上抛的最大高度 | |
| C. | 卫星绕月球运动的角速度ω和轨道半径r及月球的半径、小铁球的质量和上抛的最大高度 | |
| D. | 卫星绕月球运动的角速度ω和轨道半径r及月球的质量和上抛的最大高度 |




8. 传感器是一种采集信息的重要器件.如图所示是一种测定压力的电容式传感器,A为固定电极,B为可动电极,组成一个电容大小可变的电容器.可动电极两端固定,当待测压力施加在可动电极上时,可动电极发生形变,从而改变了电容器的电容.现将此电容式传感器与零刻度在 中央的灵敏电流表和电源串联成闭合电路,已知电流从电流表正接线柱流入时指针向右偏转,当待测压力增大时,下列说法中不正确的是( )
传感器是一种采集信息的重要器件.如图所示是一种测定压力的电容式传感器,A为固定电极,B为可动电极,组成一个电容大小可变的电容器.可动电极两端固定,当待测压力施加在可动电极上时,可动电极发生形变,从而改变了电容器的电容.现将此电容式传感器与零刻度在 中央的灵敏电流表和电源串联成闭合电路,已知电流从电流表正接线柱流入时指针向右偏转,当待测压力增大时,下列说法中不正确的是( )
传感器是一种采集信息的重要器件.如图所示是一种测定压力的电容式传感器,A为固定电极,B为可动电极,组成一个电容大小可变的电容器.可动电极两端固定,当待测压力施加在可动电极上时,可动电极发生形变,从而改变了电容器的电容.现将此电容式传感器与零刻度在 中央的灵敏电流表和电源串联成闭合电路,已知电流从电流表正接线柱流入时指针向右偏转,当待测压力增大时,下列说法中不正确的是( )| A. | 电容器的电容将增加 | B. | 电容器的电荷量将增加 | ||
| C. | 灵敏电流表指针向左偏转 | D. | 灵敏电流表指针向右偏转 |
7. 一质量为m的小球以初动能Ek0从地面竖直向上抛出,已知上升过程中受到阻力作用,图中两条图线分别表示小球在上升过程中动能、重力势能中的某一个与其上升高度之间的关系,(以地面为零势能面,ho表示上升的最大高度,图中坐标数据中的k值为常数且满足0<k<l)则由图可知,下列结论正确的是( )
一质量为m的小球以初动能Ek0从地面竖直向上抛出,已知上升过程中受到阻力作用,图中两条图线分别表示小球在上升过程中动能、重力势能中的某一个与其上升高度之间的关系,(以地面为零势能面,ho表示上升的最大高度,图中坐标数据中的k值为常数且满足0<k<l)则由图可知,下列结论正确的是( )
一质量为m的小球以初动能Ek0从地面竖直向上抛出,已知上升过程中受到阻力作用,图中两条图线分别表示小球在上升过程中动能、重力势能中的某一个与其上升高度之间的关系,(以地面为零势能面,ho表示上升的最大高度,图中坐标数据中的k值为常数且满足0<k<l)则由图可知,下列结论正确的是( )| A. | ①表示的是动能随上升高度的图象,②表示的是重力势能随上升高度的图象 | |
| B. | 上升过程中阻力大小恒定且f=(k+1)mg | |
| C. | 上升高度h=$\frac{k+1}{k+2}$h0时,重力势能和动能相等 | |
| D. | 上升高度h=$\frac{{h}_{0}}{2}$时,动能与重力势能之差为$\frac{k}{2}$mgh0 |
6.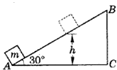 如图所示,一个质量为m的物体(可视为质点)以某一速度从A点冲上倾角为30°的固定斜面,其运动的加速度为$\frac{3g}{4}$,物体上升的最大高度为h,则在这个过程中物体的( )
如图所示,一个质量为m的物体(可视为质点)以某一速度从A点冲上倾角为30°的固定斜面,其运动的加速度为$\frac{3g}{4}$,物体上升的最大高度为h,则在这个过程中物体的( )
0 132954 132962 132968 132972 132978 132980 132984 132990 132992 132998 133004 133008 133010 133014 133020 133022 133028 133032 133034 133038 133040 133044 133046 133048 133049 133050 133052 133053 133054 133056 133058 133062 133064 133068 133070 133074 133080 133082 133088 133092 133094 133098 133104 133110 133112 133118 133122 133124 133130 133134 133140 133148 176998
如图所示,一个质量为m的物体(可视为质点)以某一速度从A点冲上倾角为30°的固定斜面,其运动的加速度为$\frac{3g}{4}$,物体上升的最大高度为h,则在这个过程中物体的( )| A. | 整个过程中物体机械能守恒 | B. | 重力势能增加了mgh | ||
| C. | 动能损失了$\frac{3mgh}{2}$ | D. | 机械能损失了$\frac{mgh}{2}$ |