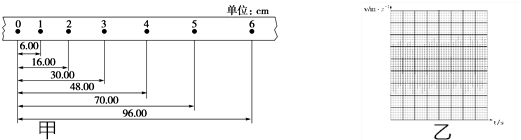
19.在“探究匀变速直线运动规律”的实验中,一打点计时器固定在斜面上,一小车托着穿过打点计时器的纸带从斜面上滑下,打出的纸带的一段如图甲所示,从纸带上取出一段,并标有0、1、2、3、4、5、6共7个计数点(相邻的两个计数点之间还有四个未画出),相邻两计数点之间时间间隔为0.1s.
(1)打点计时器连接是交流(选填“交流”或“直流”)电源;
(2)求出计数点3和5 的瞬时速度v3和v5,并填入下列表格内对应位置
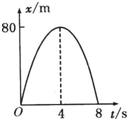
(3)将上表中1、2、3、4、5各个读数点时刻的瞬时速度标在图乙的坐标线上,并画出小车的瞬时速度随时间变化的v-t关系图线;
(4)从图象中可求得小车加速度为a=4.0m/s2,小车在最初计数点0时的初速度v0=0.4m/s.
(1)打点计时器连接是交流(选填“交流”或“直流”)电源;
(2)求出计数点3和5 的瞬时速度v3和v5,并填入下列表格内对应位置
| 计数点位置 | 1 | 2 | 3 | 4 | 5 |
| 瞬时速度v(m/s) | 0.8 | 1.2 | 1.6 | 2.0 | 2.4 |
(4)从图象中可求得小车加速度为a=4.0m/s2,小车在最初计数点0时的初速度v0=0.4m/s.
18. 如图所示为一质点运动的位移随时间变化的图象,图象是一条抛物线,方程式为x=-5t2+40t,下列说法正确的是( )
如图所示为一质点运动的位移随时间变化的图象,图象是一条抛物线,方程式为x=-5t2+40t,下列说法正确的是( )
如图所示为一质点运动的位移随时间变化的图象,图象是一条抛物线,方程式为x=-5t2+40t,下列说法正确的是( )| A. | t=4s时,质点的速度最大 | |
| B. | 质点在第8s末时的速度是-40m/s | |
| C. | 质点做匀变速直线运动,其加速度大小为10m/s2. | |
| D. | 在0-8s的过程中,位移的最大值是80m |
17. 某质点在东西方向上做直线运动,设定向东的方向为正方向,其位移随时间的变化图象如图所示,根据图象可知( )
某质点在东西方向上做直线运动,设定向东的方向为正方向,其位移随时间的变化图象如图所示,根据图象可知( )
某质点在东西方向上做直线运动,设定向东的方向为正方向,其位移随时间的变化图象如图所示,根据图象可知( )| A. | 质点在4~8s内的速度为-4m/s | |
| B. | 在0~4s时间内,质点向东做匀加速直线运动 | |
| C. | 在0~8s时间内质点的位移为-8m | |
| D. | 质点在0~4s内的速度为4m/s |
16.在近地空中某一位置处有A、B两个小球,先让A球自由下落1s后再让B球自由下落,则在A球落地前,相关说法正确的是( )
| A. | 球A比球B的速度变化快 | |
| B. | 若以B球为参照系,球A将以大约10m/s的速度匀速下降 | |
| C. | 两球会在空中相碰 | |
| D. | A球下落1s后至落地前,两球始终相对静止 |




14.关于力和重力,下列说法正确的是( )
| A. | 只要有一个物体就可以有力的作用,两个物体的作用一定有两个力 | |
| B. | 力的作用效果最主要的是取决于力的大小,其他因素可以忽略不计 | |
| C. | 物体的重心就是整个物体的重力可以等效作用在这个点上 | |
| D. | 物体的重心在这个物体的几何中心上,所以重心必然在物体上 |
13.国庆长假的10月3日,张老师早上8:00开车从南京出发去高淳漫城,行驶128km后于9:50到达“漫城”入口,则下列说法正确的是( )
| A. | 长假期间高速公路免收费,在研究汽车经过收费站18m通道这段距离时可以将汽车视为质点 | |
| B. | 当汽车在高速路上行驶中,坐在车上的儿子看到同方向的汽车向后开,它是以自己为参考系的 | |
| C. | 题目中的8:00和9:50指的是时间,它们间的间隔是时刻 | |
| D. | 根据题中数据求出张老师开车全程行驶128km的平均速度 |
12.在机器人大赛中,某机器人在平面内由点(0,0)出发,沿直线运动到点(3,1),然后又由点(3,1)沿直线运动到点(1,4),然后又由点(1,4)沿直线运动到点(5,5),最后又由点(5,5)沿直线运动到点(2,2),平面坐标系横、纵坐标轴的单位长度为1m.整个过程中机器人所用时间是2$\sqrt{2}$s,则( )
0 127799 127807 127813 127817 127823 127825 127829 127835 127837 127843 127849 127853 127855 127859 127865 127867 127873 127877 127879 127883 127885 127889 127891 127893 127894 127895 127897 127898 127899 127901 127903 127907 127909 127913 127915 127919 127925 127927 127933 127937 127939 127943 127949 127955 127957 127963 127967 127969 127975 127979 127985 127993 176998
| A. | 机器人的运动轨迹是一条直线 | |
| B. | 机器人不会两次通过同一点 | |
| C. | 整个过程中机器人的位移大小为2$\sqrt{2}$m | |
| D. | 整个过程中机器人的位移与由点(5,5)运动到点(2,2)的位移方向相反 |
 如图是做探究电磁感应的产生条件实验的器材及示意图
如图是做探究电磁感应的产生条件实验的器材及示意图 如图所示,水平地面上,光滑物块甲从A点在外力作用下以a1=5m/s2的加速度由静止开始运动,同时物块乙从B点以初速度v0水平向左运动,物块甲运动到C点时去掉外力,从A、B开始运动计时,经时间t=1.0s两物块相遇.已知物块乙与水平面间的动摩擦因数μ=0.2,A、C两点间的距离s1=0.1m,B、C两点间的距离s2=2.8m.重力加速度g=10m/s2,求:
如图所示,水平地面上,光滑物块甲从A点在外力作用下以a1=5m/s2的加速度由静止开始运动,同时物块乙从B点以初速度v0水平向左运动,物块甲运动到C点时去掉外力,从A、B开始运动计时,经时间t=1.0s两物块相遇.已知物块乙与水平面间的动摩擦因数μ=0.2,A、C两点间的距离s1=0.1m,B、C两点间的距离s2=2.8m.重力加速度g=10m/s2,求: