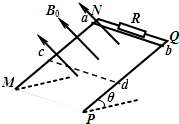
 如图所示,MN、PQ为间距L=0.5m足够长的光滑平行导轨,NQ⊥MN,导轨的电阻均不计.导轨平面与水平面间的夹角θ=30°,NQ间连接有一个R=3Ω的电阻.一匀强磁场垂直于导轨平面且方向向上,磁感应强度为B0=1T.将一根质量为m=0.05kg的金属棒ab紧靠NQ放置在导轨上,且与导轨接触良好.现由静止释放金属棒,当金属棒滑行至cd处时达到稳定速度v=4m/s,已知在此过程中通过金属棒截面的电量q=0.5C.设金属棒沿导轨向下运动过程中始终与NQ平行.(取g=10m/s2.求:
如图所示,MN、PQ为间距L=0.5m足够长的光滑平行导轨,NQ⊥MN,导轨的电阻均不计.导轨平面与水平面间的夹角θ=30°,NQ间连接有一个R=3Ω的电阻.一匀强磁场垂直于导轨平面且方向向上,磁感应强度为B0=1T.将一根质量为m=0.05kg的金属棒ab紧靠NQ放置在导轨上,且与导轨接触良好.现由静止释放金属棒,当金属棒滑行至cd处时达到稳定速度v=4m/s,已知在此过程中通过金属棒截面的电量q=0.5C.设金属棒沿导轨向下运动过程中始终与NQ平行.(取g=10m/s2.求: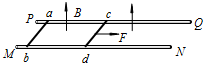 如图所示,PQ和MN是固定于水平面内间距L=1.0m的平行金属轨道,轨道足够长,其电阻可忽略不计.两相同的金属棒ab、cd放在轨道上,运动过程中始终与轨道垂直,且接触良好,它们与轨道形成闭合回路.已知每根金属棒的质量m=0.20kg,每根金属棒位于两轨道之间部分的电阻值R=1.0Ω;金属棒与轨道间的动摩擦因数μ=0.20,且与轨道间的最大静摩擦力等于滑动摩擦力.整个装置处在竖直向上、磁感应强度B=0.40T的匀强磁场中,取重力加速度g=10m/s2.
如图所示,PQ和MN是固定于水平面内间距L=1.0m的平行金属轨道,轨道足够长,其电阻可忽略不计.两相同的金属棒ab、cd放在轨道上,运动过程中始终与轨道垂直,且接触良好,它们与轨道形成闭合回路.已知每根金属棒的质量m=0.20kg,每根金属棒位于两轨道之间部分的电阻值R=1.0Ω;金属棒与轨道间的动摩擦因数μ=0.20,且与轨道间的最大静摩擦力等于滑动摩擦力.整个装置处在竖直向上、磁感应强度B=0.40T的匀强磁场中,取重力加速度g=10m/s2. 如图所示,光滑的水平金属框架(足够长,电阻不计)固定在方向竖直向下的匀强磁场中,框架左端连接一个R=0.4Ω的电阻,框架上垂直导轨放置一电阻r=0.1Ω的金属导体棒ab,金属导体棒长为0.5m,两端恰与框架接触,且接触良好,金属导体棒ab在F=0.4N的水平恒力作用下由静止开始向右运动,金属导体棒ab的最大速度v=0.25m/s.
如图所示,光滑的水平金属框架(足够长,电阻不计)固定在方向竖直向下的匀强磁场中,框架左端连接一个R=0.4Ω的电阻,框架上垂直导轨放置一电阻r=0.1Ω的金属导体棒ab,金属导体棒长为0.5m,两端恰与框架接触,且接触良好,金属导体棒ab在F=0.4N的水平恒力作用下由静止开始向右运动,金属导体棒ab的最大速度v=0.25m/s.
5. 如图所示,质量相同且分布均匀的两个圆柱体A、B靠在一起,表面光滑,重力均为G,其中B的下一半刚好固定在水平面MN的下方,上边露出另一半,A静止在平面上,现过A的轴心施以水平作用力F,则下列说法正确的是( )
如图所示,质量相同且分布均匀的两个圆柱体A、B靠在一起,表面光滑,重力均为G,其中B的下一半刚好固定在水平面MN的下方,上边露出另一半,A静止在平面上,现过A的轴心施以水平作用力F,则下列说法正确的是( )
如图所示,质量相同且分布均匀的两个圆柱体A、B靠在一起,表面光滑,重力均为G,其中B的下一半刚好固定在水平面MN的下方,上边露出另一半,A静止在平面上,现过A的轴心施以水平作用力F,则下列说法正确的是( )| A. | 当F=$\sqrt{3}$G,物体A恰好离开地面 | |
| B. | 从物体A恰好离开地面到物体被拉着开始沿物体b表面缓慢移动到最高位置的过程中,拉力F逐渐减小 | |
| C. | 从物体A恰好离开地面到物体被拉着开始沿物体b表面缓慢移动到最高位置的过程中,拉力F逐渐增大 | |
| D. | 从物体A恰好离开地面到物体被拉着开始沿物体b表面缓慢移动到最高位置的过程中,A、B间的压力最大值为2G |
4.已知月球的半径为R,在月球表面以初速度v0竖直上抛一个小球,经时间t落回出发点,若在月球上发射一颗环绕月球做匀速圆周运动的卫星,以下说法中正确的是( )
| A. | 卫星的线速度不可能大于$\sqrt{\frac{2R{v}_{0}}{t}}$ | B. | 卫星的加速度不可能大于$\frac{2{v}_{0}}{t}$ | ||
| C. | 卫星的角速度不可能大于$\sqrt{\frac{2{v}_{0}}{Rt}}$ | D. | 以上说法都不对. |
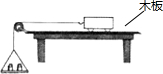
 如图所示,一长木板质量为M=4kg,木板与地面的动摩擦因数μ1=0.2,质量为m=2kg的小滑块放在木板的右端,小滑块与木板间的动摩擦因数μ2=0.4.开始时木板与滑块都处于静止状态,木板的右端与右侧竖直墙壁的距离L=2.7m,现给木板以水平向右的初速度v0=6m/s使木板向右运动,设木板与墙壁碰撞时间极短,且碰后以原速率弹回,取g=10m/s2,求:
如图所示,一长木板质量为M=4kg,木板与地面的动摩擦因数μ1=0.2,质量为m=2kg的小滑块放在木板的右端,小滑块与木板间的动摩擦因数μ2=0.4.开始时木板与滑块都处于静止状态,木板的右端与右侧竖直墙壁的距离L=2.7m,现给木板以水平向右的初速度v0=6m/s使木板向右运动,设木板与墙壁碰撞时间极短,且碰后以原速率弹回,取g=10m/s2,求:
2.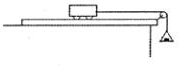 在“探究加速度与力、质量的关系”的实验中,采用如图所示的装置,关于该实验下列说法正确的是( )
在“探究加速度与力、质量的关系”的实验中,采用如图所示的装置,关于该实验下列说法正确的是( )
在“探究加速度与力、质量的关系”的实验中,采用如图所示的装置,关于该实验下列说法正确的是( )| A. | 在探究加速度与质量的关系时,每次改变小车质量时都应平衡摩擦力 | |
| B. | 在探究加速度与外力的关系时,作出a-F的图象为曲线 | |
| C. | 在探究加速度a与小车质量M的关系时,为了直观判断二者间的关系,应作出a-$\frac{1}{M}$图象 | |
| D. | 当小车的质量远大于盘和砝码的总质量时,不能近似认为细线对小车的拉力大小等于盘和砝码的总重力大小 |
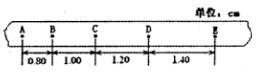 某次实验中打点计时器在纸带上依次打出一系列的点,取A,B,C,D,E五个计数点,距离如图所示,每两个计数点间有四个点未画出,且打点计时器打点周期为0.02s,则打C点的瞬间,纸带的速度大小为0.11m/s,纸带运动的加速度a=0.20m/s2(计算结果都保留两位有效数字)
某次实验中打点计时器在纸带上依次打出一系列的点,取A,B,C,D,E五个计数点,距离如图所示,每两个计数点间有四个点未画出,且打点计时器打点周期为0.02s,则打C点的瞬间,纸带的速度大小为0.11m/s,纸带运动的加速度a=0.20m/s2(计算结果都保留两位有效数字)
20.如图为用拉力传感器和速度传感器探究“加速度与物体受力的关系”实验装置,用拉力传感器记录小车受到拉力的大小,在长木板上相距L=48.0cm的A、B两点各安装一个速度传感器,分别记录小车到达A、B时的速率.

(1)实验主要步骤如下:
①将拉力传感器固定在小车上;
②平衡摩擦力,让小车做匀速直线运动;
③把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
④接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
⑤改变所挂钩码的数量,重复④的操作.
(2)表中记录了实验测得的几组数据,vB2-vA2是两个速度传感器记录速率的平方差,则加速度的表达式a=$\frac{{{v}_{B}}^{2}-{{v}_{A}}^{2}}{2L}$
(3)由表中数据,在图中的坐标纸上作出a~F关系图线;
(4)对比实验结果与理论计算得到的关系图线(图中已画出理论图线),造成上述偏差的原因是没有完全平衡摩擦力或拉力传感器读数偏大.
0 128589 128597 128603 128607 128613 128615 128619 128625 128627 128633 128639 128643 128645 128649 128655 128657 128663 128667 128669 128673 128675 128679 128681 128683 128684 128685 128687 128688 128689 128691 128693 128697 128699 128703 128705 128709 128715 128717 128723 128727 128729 128733 128739 128745 128747 128753 128757 128759 128765 128769 128775 128783 176998
(1)实验主要步骤如下:
①将拉力传感器固定在小车上;
②平衡摩擦力,让小车做匀速直线运动;
③把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
④接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
⑤改变所挂钩码的数量,重复④的操作.
(2)表中记录了实验测得的几组数据,vB2-vA2是两个速度传感器记录速率的平方差,则加速度的表达式a=$\frac{{{v}_{B}}^{2}-{{v}_{A}}^{2}}{2L}$
| 序号 | F(N) | vB2-vA2(m2/s2) | a(m/s2) |
| 1 | 0.60 | 0.77 | 0.80 |
| 2 | 1.04 | 1.61 | 1.68 |
| 3 | 1.42 | 2.31 | |
| 4 | 2.62 | 4.65 | 4.84 |
| 5 | 3.00 | 5.49 | 5.72 |
(4)对比实验结果与理论计算得到的关系图线(图中已画出理论图线),造成上述偏差的原因是没有完全平衡摩擦力或拉力传感器读数偏大.
 利用图示装置来探究加速度与力、质量的关系.
利用图示装置来探究加速度与力、质量的关系.