18. 质量相同的甲、乙两小车同时同地做匀速直线运动,它们运动的s-t图象如图所示.由图象可知( )
质量相同的甲、乙两小车同时同地做匀速直线运动,它们运动的s-t图象如图所示.由图象可知( )
质量相同的甲、乙两小车同时同地做匀速直线运动,它们运动的s-t图象如图所示.由图象可知( )| A. | 甲小车所受的摩擦力较大 | B. | 乙小车所受的拉力较大 | ||
| C. | 甲小车具有的动能较大 | D. | 拉力对两小车做的功一样多 |
17.学完密度知识后,一位普通中学生对自己的身体体积进行了估算,下列估算值最接近实际的是(已知人体的密度约等于水的密度)( )
| A. | 60cm3 | B. | 60dm3 | C. | 120cm3 | D. | 120dm3 |
 如图所示是蹦极运动的简化示意图,弹性绳一端固定在O点,另一端系住运动员,运动员从O点自由下落,到A点处弹性绳自然伸直.B点是弹性绳对运动员的拉力等于其重力的点,C点是蹦极运动员到达的最低点(忽略空气阻力),则从O点到C点的过程中运动员的重力势能一直在减小,在B(填“A”或“B”或“C)点处运动员的动能最大,从A点运动到C点运动员的机械能减小(填“增大”或“减小”或“不变”).
如图所示是蹦极运动的简化示意图,弹性绳一端固定在O点,另一端系住运动员,运动员从O点自由下落,到A点处弹性绳自然伸直.B点是弹性绳对运动员的拉力等于其重力的点,C点是蹦极运动员到达的最低点(忽略空气阻力),则从O点到C点的过程中运动员的重力势能一直在减小,在B(填“A”或“B”或“C)点处运动员的动能最大,从A点运动到C点运动员的机械能减小(填“增大”或“减小”或“不变”).
 图是教材中的一个浮力小实验:
图是教材中的一个浮力小实验: 做“研究水内部压强大小”的实验,他的猜想是:影响水内部压强的大小有两个因素,一个是水深(即图中的h值),另一个是离水底的距离(即图中的d值),且h越大,压强越大;d越小,压强越小.本实验是通过观察U形管中液面高度差的变化而知道压强大小变化的.根据学习过的知识,你是否认为水内部压强大小跟水底的距离d有关?
做“研究水内部压强大小”的实验,他的猜想是:影响水内部压强的大小有两个因素,一个是水深(即图中的h值),另一个是离水底的距离(即图中的d值),且h越大,压强越大;d越小,压强越小.本实验是通过观察U形管中液面高度差的变化而知道压强大小变化的.根据学习过的知识,你是否认为水内部压强大小跟水底的距离d有关?
11.在斜面上拉一个重4.5N的物体到高处,沿斜面向上的拉力为1.8N,斜面长s=1.2m,高h=0.3m.则提升重物所做的有用功和该斜面的机械效率分别为( )

| A. | 2.16J 37.5% | B. | 5.4J 62.5% | C. | 1.35J 62.5% | D. | 1.35J 37.5% |
10. 2011年12月27日,我国第十颗北斗导航卫星发射成功,标志着我国自主卫星导航系统建设进入新的发展时期.上图是导航卫星的轨道示意图,已知该卫星沿椭圆轨道绕地球运行的过程中机械能守恒,该卫星从远地点向近地点运行过程中势能、动能、速度的变化是( )
2011年12月27日,我国第十颗北斗导航卫星发射成功,标志着我国自主卫星导航系统建设进入新的发展时期.上图是导航卫星的轨道示意图,已知该卫星沿椭圆轨道绕地球运行的过程中机械能守恒,该卫星从远地点向近地点运行过程中势能、动能、速度的变化是( )
2011年12月27日,我国第十颗北斗导航卫星发射成功,标志着我国自主卫星导航系统建设进入新的发展时期.上图是导航卫星的轨道示意图,已知该卫星沿椭圆轨道绕地球运行的过程中机械能守恒,该卫星从远地点向近地点运行过程中势能、动能、速度的变化是( )| A. | 速度减小、动能减小、势能增加 | B. | 速度不变、动能不变、势能不变 | ||
| C. | 速度不变、动能增加、势能减小 | D. | 速度增加、动能增加、势能减小 |
9.小明和小红利用如图甲装置,在杠杆支点的两边分别挂上钩码来探究杠杆的平衡条件: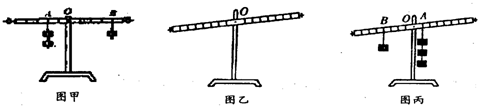
(1)如图乙,为使杠杆在水平位置平衡,应将左端的平衡螺母向右(选填“左”或“右”)移动,将杠杆调整在水平位置的目的是为了方便测量力臂大小;
(2)小明在实验中记录了三次实验数据如下表:这三次实验数据中有一次是错误的,错误数据的实验次数是1,由正确实验结果可得杠杆的平衡条件是F1L1=F2L2;
(3)小红调节好平衡后,在杠杆两端挂上钩码,杠杆的状态如图丙所示,为此,小红又调节两端的平衡螺母,使杠杆重新回到水平平衡位置,然后正确记录下钩码重、动力臂OA和阻力臂OB的值,分析实验数据后发现得不到教材中的“杠杆的平衡条件”,小红的哪一步操作导致了实验结果与教材中的结论不一致?答:杠杆上挂钩码后,小红又调节了平衡螺母;
(4)有同学用现有实验方案得到如下结论“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”,这个结论与杠杆的平衡条件不符,原因是实验过程中B.
A.没有改变力的大小 B.没有改变力的方向
C.没有改变力的作用点 D.实验次数较少,结论具有偶然性.
0 184360 184368 184374 184378 184384 184386 184390 184396 184398 184404 184410 184414 184416 184420 184426 184428 184434 184438 184440 184444 184446 184450 184452 184454 184455 184456 184458 184459 184460 184462 184464 184468 184470 184474 184476 184480 184486 184488 184494 184498 184500 184504 184510 184516 184518 184524 184528 184530 184536 184540 184546 184554 235360
(1)如图乙,为使杠杆在水平位置平衡,应将左端的平衡螺母向右(选填“左”或“右”)移动,将杠杆调整在水平位置的目的是为了方便测量力臂大小;
(2)小明在实验中记录了三次实验数据如下表:这三次实验数据中有一次是错误的,错误数据的实验次数是1,由正确实验结果可得杠杆的平衡条件是F1L1=F2L2;
| 次数/实验 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 1.0 | 10 | 0.5 | 15 |
| 2 | 2.0 | 10 | 1.0 | 20 |
| 3 | 2.0 | 20 | 4.0 | 10 |
(4)有同学用现有实验方案得到如下结论“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”,这个结论与杠杆的平衡条件不符,原因是实验过程中B.
A.没有改变力的大小 B.没有改变力的方向
C.没有改变力的作用点 D.实验次数较少,结论具有偶然性.