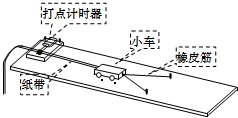
 用如图所示的装置做《探究橡皮筋做的功和小车速度变化的关系》的实验.
用如图所示的装置做《探究橡皮筋做的功和小车速度变化的关系》的实验. 如图甲所示,两块相同的平行金属板M、N正对着放置,相距为$\frac{R}{2}$,板M、N上的小孔A、C与O三点共线,CO=R,连线AO垂直于板M、N.以O为圆心、R为半径的圆形区域内存在磁感应强度大小为B、方向垂直纸面向里的匀强磁场.收集屏PQ上各点到O点的距离都为2R,两端点P、Q关于连线AO对称,屏PQ所对的圆心角θ=120°.质量为m、电荷量为e的质子连续不断地经A进入M、N间的电场,接着通过C进入磁场.质子重力及质子间的相互作用均不计,质子在A处的速度看作零.
如图甲所示,两块相同的平行金属板M、N正对着放置,相距为$\frac{R}{2}$,板M、N上的小孔A、C与O三点共线,CO=R,连线AO垂直于板M、N.以O为圆心、R为半径的圆形区域内存在磁感应强度大小为B、方向垂直纸面向里的匀强磁场.收集屏PQ上各点到O点的距离都为2R,两端点P、Q关于连线AO对称,屏PQ所对的圆心角θ=120°.质量为m、电荷量为e的质子连续不断地经A进入M、N间的电场,接着通过C进入磁场.质子重力及质子间的相互作用均不计,质子在A处的速度看作零. 用如图所示的装置,探究功与物体速度变化的关系.实验时先适当垫高木板,然后由静止释放小车,小车在橡皮条弹力的作用下被弹出,沿木板滑行.小车滑行过程中带动通过打点计器的纸带,记录其运动情况.观察发现纸带前面部分点迹疏密不匀,后面部分点迹比较均匀,回答下列问题:
用如图所示的装置,探究功与物体速度变化的关系.实验时先适当垫高木板,然后由静止释放小车,小车在橡皮条弹力的作用下被弹出,沿木板滑行.小车滑行过程中带动通过打点计器的纸带,记录其运动情况.观察发现纸带前面部分点迹疏密不匀,后面部分点迹比较均匀,回答下列问题: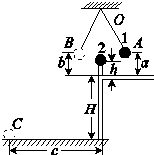 如图是用来验证动量守恒的实验装置,弹性球1用细线悬挂于O点,O点下方桌子的边沿有一竖直立柱.实验时,调节悬点,使弹性球1静止时恰与立柱上的球2接触且两球等高.将球1拉到A点,并使之静止,同时把球2放在立柱上.释放球1,当它摆到悬点正下方时与球2发生对心碰撞,碰后球1向左最远可摆到B点,球2落到水平地面上的C点.测出有关数据即可验证1、2两球碰撞时动量守恒.现已测出A点离水平桌面的距离为a,B点离水平桌面的距离为b,C点与桌子边沿间的水平距离为c.此时,
如图是用来验证动量守恒的实验装置,弹性球1用细线悬挂于O点,O点下方桌子的边沿有一竖直立柱.实验时,调节悬点,使弹性球1静止时恰与立柱上的球2接触且两球等高.将球1拉到A点,并使之静止,同时把球2放在立柱上.释放球1,当它摆到悬点正下方时与球2发生对心碰撞,碰后球1向左最远可摆到B点,球2落到水平地面上的C点.测出有关数据即可验证1、2两球碰撞时动量守恒.现已测出A点离水平桌面的距离为a,B点离水平桌面的距离为b,C点与桌子边沿间的水平距离为c.此时,
14. 如图所示,在光滑的水平面上放有一物体M,物体上有一光滑的半圆弧轨道,轨道半径为R,最低点为C,两端A、B等高,现让小滑块m从A点静止下滑,在此后的过程中,则( )
如图所示,在光滑的水平面上放有一物体M,物体上有一光滑的半圆弧轨道,轨道半径为R,最低点为C,两端A、B等高,现让小滑块m从A点静止下滑,在此后的过程中,则( )
如图所示,在光滑的水平面上放有一物体M,物体上有一光滑的半圆弧轨道,轨道半径为R,最低点为C,两端A、B等高,现让小滑块m从A点静止下滑,在此后的过程中,则( )| A. | 小滑块到达B点时半圆弧轨道的速度为零 | |
| B. | 小滑块到达C点时的动能小于mgR | |
| C. | 若小滑块与半圆弧轨道有摩擦,小滑块与半圆弧轨道组成的系统在水平方向动量不守恒 | |
| D. | m从A到B的过程中,M运动的位移为$\frac{mR}{M+m}$ |
13.下列说法中正确的是( )
| A. | 汤姆孙发现电子并提出了原子核式结构模型 | |
| B. | 贝克勒尔用α粒子轰击氮原子核发现了质子 | |
| C. | 在原子核人工转变的实验中,约里奥-居里夫妇发现了正电子 | |
| D. | 在原子核人工转变的实验中,卢瑟福发现了中子 |
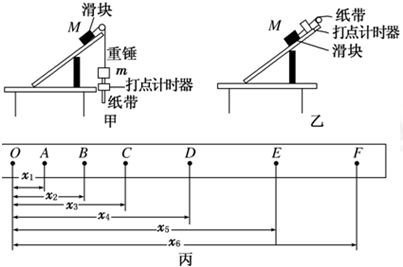
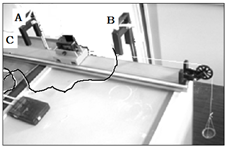
9.某实验小组利用无线力传感器和光电门传感器探究“动能定理”.将无线力传感器和挡光片固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,无线力传感器记录小车受到拉力的大小.在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示.在小车上放置砝码来改变小车质量,用不同的重物G来改变拉力的大小.
实验主要步骤如下:
(1)测量小车和拉力传感器的总质量M1.正确连接所需电路.调节导轨两端的旋钮改变导轨的倾斜度,用以平衡小车的摩擦力,使小车正好做匀速运动.
(2)把细线的一端固定在力传感器上,另一端通过定滑轮与重物G相连;将小车停在点C,由静止开始释放小车,小车在细线拉动下运动,除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为两光电门间的距离L;
(3)改变小车的质量或重物的质量,重复(2)的操作.
(4)表格中M是M1与小车中砝码质量之和,△E为动能变化量,F是拉力传感器的拉力,W是F在A、B间所做的功.表中的△E3=0.600J,W3=0.610J(结果保留三位有效数字).
0 130819 130827 130833 130837 130843 130845 130849 130855 130857 130863 130869 130873 130875 130879 130885 130887 130893 130897 130899 130903 130905 130909 130911 130913 130914 130915 130917 130918 130919 130921 130923 130927 130929 130933 130935 130939 130945 130947 130953 130957 130959 130963 130969 130975 130977 130983 130987 130989 130995 130999 131005 131013 176998
| 次数 | M/kg | |v22-v12|/(m2/s-2 | △E/J | F/N | W/J |
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 |
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 |
| 3 | 0.500 | 2.40 | △E2 | 1.22 | W2 |
(1)测量小车和拉力传感器的总质量M1.正确连接所需电路.调节导轨两端的旋钮改变导轨的倾斜度,用以平衡小车的摩擦力,使小车正好做匀速运动.
(2)把细线的一端固定在力传感器上,另一端通过定滑轮与重物G相连;将小车停在点C,由静止开始释放小车,小车在细线拉动下运动,除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为两光电门间的距离L;
(3)改变小车的质量或重物的质量,重复(2)的操作.
(4)表格中M是M1与小车中砝码质量之和,△E为动能变化量,F是拉力传感器的拉力,W是F在A、B间所做的功.表中的△E3=0.600J,W3=0.610J(结果保留三位有效数字).