8.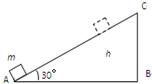 如图所示,质量为m的物体(可视为质点)以某一速度从A点冲上倾角为30°的固定斜面,其运动的加速度为$\frac{2g}{3}$,此物体在斜面上上升的最大高度为h,则在这个过程中物体( )
如图所示,质量为m的物体(可视为质点)以某一速度从A点冲上倾角为30°的固定斜面,其运动的加速度为$\frac{2g}{3}$,此物体在斜面上上升的最大高度为h,则在这个过程中物体( )
如图所示,质量为m的物体(可视为质点)以某一速度从A点冲上倾角为30°的固定斜面,其运动的加速度为$\frac{2g}{3}$,此物体在斜面上上升的最大高度为h,则在这个过程中物体( )| A. | 机械能损失$\frac{2mgh}{3}$ | B. | 动能损失了mgh | ||
| C. | 克服摩擦力做功$\frac{mgh}{6}$ | D. | 重力势能增加了mgh |
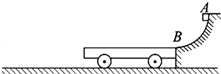 如图所示,AB为半径R=0.8m的1/4光滑圆弧轨道,下端B恰与平板小车右端平滑对接.小车质量 M=3kg.现有一质量m=1kg的小滑块,由轨道顶端无初速释放,滑到B端后冲上小车.滑块与小车上表面间的动摩擦因数μ=0.3,地面光滑.最后滑块与小车一起以1m/s的速度在水平面上匀速运动.试求:(g=10m/s2 )
如图所示,AB为半径R=0.8m的1/4光滑圆弧轨道,下端B恰与平板小车右端平滑对接.小车质量 M=3kg.现有一质量m=1kg的小滑块,由轨道顶端无初速释放,滑到B端后冲上小车.滑块与小车上表面间的动摩擦因数μ=0.3,地面光滑.最后滑块与小车一起以1m/s的速度在水平面上匀速运动.试求:(g=10m/s2 )
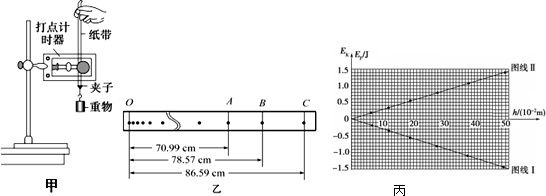
6.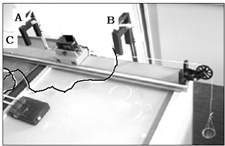 某实验小组利用无线力传感器和光电门传感器探究“动能定理”.将无线力传感器和挡光片固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,无线力传感器记录小车受到拉力的大小.在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示.在小车上放置砝码来改变小车质量,用不同的重物G来改变拉力的大小.
某实验小组利用无线力传感器和光电门传感器探究“动能定理”.将无线力传感器和挡光片固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,无线力传感器记录小车受到拉力的大小.在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示.在小车上放置砝码来改变小车质量,用不同的重物G来改变拉力的大小.
实验主要步骤如下:
(1)测量小车和拉力传感器的总质量M1.正确连接所需电路.调节导轨两端的旋钮改变导轨的倾斜度,用以平衡小车的摩擦力,使小车正好做匀速运动.
(2)把细线的一端固定在力传感器上,另一端通过定滑轮与重物G相连;将小车停在点C,由静止开始释放小车,小车在细线拉动下运动,除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为两光电门间的距离L;
(3)改变小车的质量或重物的质量,重复(2)的操作.
(4)表格中M是M1与小车中砝码质量之和,△E为动能变化量,F是拉力传感器的拉力,W是F在A、B间所做的功.表中的△E3=0.600J,W3=0.610J(结果保留三位有效数字).
某实验小组利用无线力传感器和光电门传感器探究“动能定理”.将无线力传感器和挡光片固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,无线力传感器记录小车受到拉力的大小.在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示.在小车上放置砝码来改变小车质量,用不同的重物G来改变拉力的大小.| 次数 | M/kg | |v22-v12|/(m2/s-2 | △E/J | F/N | W/J |
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 |
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 |
| 3 | 0.500 | 2.40 | △E2 | 1.22 | W2 |
(1)测量小车和拉力传感器的总质量M1.正确连接所需电路.调节导轨两端的旋钮改变导轨的倾斜度,用以平衡小车的摩擦力,使小车正好做匀速运动.
(2)把细线的一端固定在力传感器上,另一端通过定滑轮与重物G相连;将小车停在点C,由静止开始释放小车,小车在细线拉动下运动,除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为两光电门间的距离L;
(3)改变小车的质量或重物的质量,重复(2)的操作.
(4)表格中M是M1与小车中砝码质量之和,△E为动能变化量,F是拉力传感器的拉力,W是F在A、B间所做的功.表中的△E3=0.600J,W3=0.610J(结果保留三位有效数字).

4.下列说法正确的是 ( )
| A. | 干湿泡温度计的干泡显示的温度和湿泡显示的温度差值越大,这表示相对湿度越大 | |
| B. | 固体很难被拉伸又很难被压缩,说明分子间既存在着引力又存在着斥力 | |
| C. | 一定质量的理想气体,如果压强不变,体积增大,那么它一定从外界吸热 | |
| D. | 自然界中只要涉及热现象的宏观自然过程都具有方向性 | |
| E. | 单晶体沿各个方向的物理性质都是不同的 |

1.某卫星绕地球做匀速圆周运动的周期为12h,该卫星与地球同步卫星比较,下列说法正确的是( )
0 130818 130826 130832 130836 130842 130844 130848 130854 130856 130862 130868 130872 130874 130878 130884 130886 130892 130896 130898 130902 130904 130908 130910 130912 130913 130914 130916 130917 130918 130920 130922 130926 130928 130932 130934 130938 130944 130946 130952 130956 130958 130962 130968 130974 130976 130982 130986 130988 130994 130998 131004 131012 176998
| A. | 线速度之比为$\root{3}{4}$ | B. | 角速度之比为1:2 | ||
| C. | 向心加速度之比为4 | D. | 轨道半径之比为$\frac{\root{3}{2}}{2}$ |
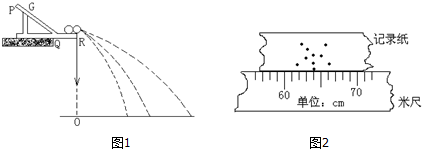
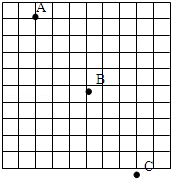 在“研究平抛物体运动”的实验中,可以描绘平抛物体运动轨迹和求物体的平抛初速度.实验简要步骤如下:
在“研究平抛物体运动”的实验中,可以描绘平抛物体运动轨迹和求物体的平抛初速度.实验简要步骤如下: