题目内容
16.下列说法正确的是( )| A. | 单位“米、千克、秒”都是国际单位制中的基本单位 | |
| B. | 单位“牛顿”是国际单位制中的基本单位 | |
| C. | 位移是理想化模型 | |
| D. | 牛顿第一定律可以通过实验进行验证 |
分析 国际单位制中力学基本单位有“米、千克、秒”,力是导出单位.位移表示质点位置的变化.牛顿第一定律不能用实验验证.
解答 解:A、单位“米、千克、秒”都是国际单位制中力学的基本单位.故A正确.
B、牛顿是导出单位,是根据牛顿第二定律推导出来的,故B错误.
C、位移表示质点位置的变化,不是理想化模型,故C错误.
D、牛顿第一定律是理想实验模型,是逻辑思维的产物,不能通过实验证实,故D错误.
故选:A.
点评 本题重点是掌握力学的三个基本单位,理解好的位移概念,都是基础问题.

练习册系列答案
相关题目

7. 如图所示,在xOy坐标系的第一象限中有一半径为r=0.1m的圆形磁场区域,磁感应强度B=1T,方向垂直纸面向里,该区域同时与x轴,y轴相切,切点分别为A,C,现有大量质量为1×10-18kg(重力不计),电量大小为2×10-10C,速率均为2×107m/s的带负电的粒子从A垂直磁场进入第一象限,速度方向与y轴夹角为θ,且0<θ<180°,则下列说法错误的是( )
如图所示,在xOy坐标系的第一象限中有一半径为r=0.1m的圆形磁场区域,磁感应强度B=1T,方向垂直纸面向里,该区域同时与x轴,y轴相切,切点分别为A,C,现有大量质量为1×10-18kg(重力不计),电量大小为2×10-10C,速率均为2×107m/s的带负电的粒子从A垂直磁场进入第一象限,速度方向与y轴夹角为θ,且0<θ<180°,则下列说法错误的是( )
如图所示,在xOy坐标系的第一象限中有一半径为r=0.1m的圆形磁场区域,磁感应强度B=1T,方向垂直纸面向里,该区域同时与x轴,y轴相切,切点分别为A,C,现有大量质量为1×10-18kg(重力不计),电量大小为2×10-10C,速率均为2×107m/s的带负电的粒子从A垂直磁场进入第一象限,速度方向与y轴夹角为θ,且0<θ<180°,则下列说法错误的是( )| A. | 粒子的轨迹圆和磁场圆的半径相等 | |
| B. | 这些粒子轨迹圆的圆心构成的圆和磁场圆的半径相等 | |
| C. | 部分粒子的运动轨迹可以穿越坐标系进入第2象限 | |
| D. | 粒子的轨迹可以覆盖整个磁场圆 |
4. 如图所示为竖直平面内的直角坐标系,一个质量为m的质点,在恒力F和重力的作用下,从坐标原点O由静止开始沿直线OA斜向下运动,直线OA与y轴负方向成θ角(θ<90°).(不计空气阻力,重力加速度为g),当F=mgtanθ时,质点的加速度为( )
如图所示为竖直平面内的直角坐标系,一个质量为m的质点,在恒力F和重力的作用下,从坐标原点O由静止开始沿直线OA斜向下运动,直线OA与y轴负方向成θ角(θ<90°).(不计空气阻力,重力加速度为g),当F=mgtanθ时,质点的加速度为( )
如图所示为竖直平面内的直角坐标系,一个质量为m的质点,在恒力F和重力的作用下,从坐标原点O由静止开始沿直线OA斜向下运动,直线OA与y轴负方向成θ角(θ<90°).(不计空气阻力,重力加速度为g),当F=mgtanθ时,质点的加速度为( )| A. | gcosθ | B. | $\frac{g}{cosθ}$ | C. | $\frac{gcos2θ}{cosθ}$ | D. | gsinθ |
11.平行板电容器始终和电池连接,下列几个过程说法正确的是( )
| A. | 两极板距离增加,两板电势差不变,电量增加 | |
| B. | 两极板距离减小,两板电势差不变,场强增大 | |
| C. | 两极板距离增加,两板电势差不变,电量不变 | |
| D. | 两极板距离减小,两板电势差不变,场强变小 |
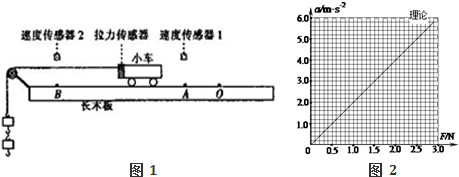
1.用拉力传感器和速度传感器“探究加速度a与物体受力F的关系”的实验装置示意图如图1所示,实验中用拉力传感器记录小车所受拉力大小,在长木板上相距L=48.0cm的A、B两个位置分别安装速度传感器1和2,用以记录小车到达A、B两位置时的速率.
(1)实验主要步骤如下:
①将拉力传感器固定在小车上;
②调整长木板的倾角角度,以平衡小车受到的摩擦力,在不挂钩码的情况下,轻推小车,看小车是否做匀速直线运动;
③把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
④接通电源后自O点静止释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
⑤改变所挂钩码的数量,重复④的操作.
(2)表中记录了实验测得的几组数据,(vB2-vA2)是两个速度传感器记录速率的平方差,用本题中设定的物理量表述加速度,其表达式a=$\frac{{{v}_{B}}^{2}-{{v}_{A}}^{2}}{2L}$.
(3)请根据表中提供的数据,在如图2“a-F”坐标系中描点作图,作出“a-F”图象.
(4)从理论上来看“a-F”图象是过原点的一条直线,本次实验得到的图线却不过坐标原点,其中原因是没有完全平衡摩擦力或拉力传感器读数偏大.
(1)实验主要步骤如下:
①将拉力传感器固定在小车上;
②调整长木板的倾角角度,以平衡小车受到的摩擦力,在不挂钩码的情况下,轻推小车,看小车是否做匀速直线运动;
③把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
④接通电源后自O点静止释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
⑤改变所挂钩码的数量,重复④的操作.
(2)表中记录了实验测得的几组数据,(vB2-vA2)是两个速度传感器记录速率的平方差,用本题中设定的物理量表述加速度,其表达式a=$\frac{{{v}_{B}}^{2}-{{v}_{A}}^{2}}{2L}$.
| 次数 | F(N) | (vB2-vA2)(m2/s2) | a(m/s2) |
| 1 | 0.60 | 0.77 | 0.80 |
| 2 | 1.04 | 1.61 | 1.68 |
| 3 | 1.42 | 2.34 | 2.44 |
| 4 | 2.62 | 4.65 | 4.84 |
| 5 | 3.00 | 5.49 | 5.72 |
(4)从理论上来看“a-F”图象是过原点的一条直线,本次实验得到的图线却不过坐标原点,其中原因是没有完全平衡摩擦力或拉力传感器读数偏大.
 用不同频率的光照射某金属均产生光电效应,测量金属的遏止电压UC与入射光频率v,得到UC-v图象,根据图象求出该金属的截止频率vc=5.0×1014Hz,普朗克常量h=6.4×10-34J•s.(电子电荷量e=1.6×10-19C)
用不同频率的光照射某金属均产生光电效应,测量金属的遏止电压UC与入射光频率v,得到UC-v图象,根据图象求出该金属的截止频率vc=5.0×1014Hz,普朗克常量h=6.4×10-34J•s.(电子电荷量e=1.6×10-19C) 如图,竖直放置的气缸,活塞横截面积为S,可在气缸内无摩擦滑动.气缸侧壁、活塞下方有一个小孔与装有水银的U形玻璃管相通,气缸内封闭了一段气柱(U形管内的气体体积不计).图示时刻活塞静止,此时缸内气体温度为t1,U形管内水银面高度差为h1.已知大气压强为p0,水银的密度为ρ,重力加速度为g.
如图,竖直放置的气缸,活塞横截面积为S,可在气缸内无摩擦滑动.气缸侧壁、活塞下方有一个小孔与装有水银的U形玻璃管相通,气缸内封闭了一段气柱(U形管内的气体体积不计).图示时刻活塞静止,此时缸内气体温度为t1,U形管内水银面高度差为h1.已知大气压强为p0,水银的密度为ρ,重力加速度为g.
