14. 我市某些餐厅用只能机器人送餐,送餐机器人的部分参数如表所示.
我市某些餐厅用只能机器人送餐,送餐机器人的部分参数如表所示.
(1)机器人身上有感应红外线新奇的接收器,以便接受信息,则该接收器相当于反射弧中的感受器.
(2)机器人底盘的轮子与水平地面接触的总面积为0.01米2,求机器人水平运送3千克物体(含餐盘)时,对地面产生的压强;
(3)如果该机器人以最大功率在水平地面上以0.4米/秒的速度匀速前进10秒,求机器人行进过程中受到地面对它的阻力.
我市某些餐厅用只能机器人送餐,送餐机器人的部分参数如表所示.| 功能 | 迎宾、送餐等 |
| 质量 | 50kg |
| 移动速度 | 0.2~0.6m/s |
| 电池容量 | 12Ah |
| 功率 | 最大功率100W |
| 工作电压 | 24V |
| 最大送餐质量 | 15kg |
(2)机器人底盘的轮子与水平地面接触的总面积为0.01米2,求机器人水平运送3千克物体(含餐盘)时,对地面产生的压强;
(3)如果该机器人以最大功率在水平地面上以0.4米/秒的速度匀速前进10秒,求机器人行进过程中受到地面对它的阻力.
13. 在学习影响滑动摩擦力大小的因素后,小柯还是认为:重力越大,滑动摩擦力越大.于是张老师用如图装置与他一起实验.
在学习影响滑动摩擦力大小的因素后,小柯还是认为:重力越大,滑动摩擦力越大.于是张老师用如图装置与他一起实验.
步骤一:将铁块挡在木板上,往砂桶中加入一定量细沙,使压力传感器的示数为5.00牛,水平向左拉动木板,读出拉力传感器的示数并记录.
步骤二:换用质量不同、粗糙程度和底面积都相同的铁块,重复步骤一,记录结果如下表:
请回答下列问题:
(1)第1次实验中铁块受到的摩擦力为2.10牛;
(2)实验中能否用钩码代替细沙?并说明理由;
(3)通过实验得出的结论是在压力和接触面粗糙程度相同时,滑动摩擦力大小相同;
(4)小柯认为:该实验中压力传感器的上表面要尽量光滑,否则会使拉力传感器的读数偏大,你认为他的说法是否合理,为什么?小柯的说法不合理;铁块与压力传感器不接触,压力传感器与木板之间的摩擦力对实验无影响.
在学习影响滑动摩擦力大小的因素后,小柯还是认为:重力越大,滑动摩擦力越大.于是张老师用如图装置与他一起实验.步骤一:将铁块挡在木板上,往砂桶中加入一定量细沙,使压力传感器的示数为5.00牛,水平向左拉动木板,读出拉力传感器的示数并记录.
步骤二:换用质量不同、粗糙程度和底面积都相同的铁块,重复步骤一,记录结果如下表:
| 实验次数 | 质量不同的铁块 | 压力传感器示数(牛) | 拉力传感器示数(牛) |
| 1 | 小 | 5.00 | 2.10 |
| 2 | 中 | 5.00 | 2.11 |
| 3 | 大 | 5.00 | 2.11 |
(1)第1次实验中铁块受到的摩擦力为2.10牛;
(2)实验中能否用钩码代替细沙?并说明理由;
(3)通过实验得出的结论是在压力和接触面粗糙程度相同时,滑动摩擦力大小相同;
(4)小柯认为:该实验中压力传感器的上表面要尽量光滑,否则会使拉力传感器的读数偏大,你认为他的说法是否合理,为什么?小柯的说法不合理;铁块与压力传感器不接触,压力传感器与木板之间的摩擦力对实验无影响.
12. 在探究凸透镜成像实验中,小柯不断改变蜡烛到透镜的距离,移动光屏寻找蜡烛的像,并将实验结果记录在下表中:
在探究凸透镜成像实验中,小柯不断改变蜡烛到透镜的距离,移动光屏寻找蜡烛的像,并将实验结果记录在下表中:
(1)第4次实验中,小柯移动光屏只观察到模糊的圆形光斑.若要观察到此时所成的像,正确的操作是在光屏的一侧透过凸透镜观察像;
(2)小柯在第1次实验的基础上,换用另一个凸透镜后,发现光屏上的像不清晰,把光屏慢慢地向凸透镜方向移动,光屏上又出现了清晰的像.若第1次实验模拟的是正常眼球的成像情况,则换用透镜后的实验是在模拟近视眼的成像情况.
在探究凸透镜成像实验中,小柯不断改变蜡烛到透镜的距离,移动光屏寻找蜡烛的像,并将实验结果记录在下表中:| 序号 | 蜡烛到透镜的距离(cm) | 像的特点 |
| 1 | 20.0 | 倒立缩小的实像 |
| 2 | 16.0 | 倒立等大的实像 |
| 3 | 12.0 | 倒立放大的实像 |
| 4 | 6.0 | ? |
(2)小柯在第1次实验的基础上,换用另一个凸透镜后,发现光屏上的像不清晰,把光屏慢慢地向凸透镜方向移动,光屏上又出现了清晰的像.若第1次实验模拟的是正常眼球的成像情况,则换用透镜后的实验是在模拟近视眼的成像情况.

10.用图中实验装置验证阿基米德原理,当物块浸入溢水杯时,水会流入空桶中,下列说法正确的是( )

| A. | 实验前溢水杯未装满水,对实验结果没有影响 | |
| B. | 物块浸入水中越深,水对溢水杯底部的压强越大 | |
| C. | 物块浸入水中越深,左侧弹簧测力计的示数越大 | |
| D. | 通过计算可知实验所用物块的密度为2×103千克/米3 |
9.小柯用图中装置提升重为400牛的物体,不计摩擦和滑轮自重,下列说法正确的是( )
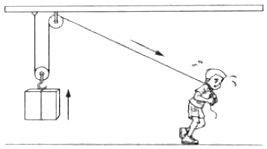
| A. | 两个滑轮均为定滑轮 | |
| B. | 人将绳子拉过1米,物体也上升1米 | |
| C. | 物体匀速上升时,人对绳子的拉力为200牛 | |
| D. | 使用该装置不能省力,但能改变力的方向 |
8. 如图是小柯连接的电路,开关闭合后,发现灯L2比L1亮,关于该电路分析正确的是( )
如图是小柯连接的电路,开关闭合后,发现灯L2比L1亮,关于该电路分析正确的是( )
如图是小柯连接的电路,开关闭合后,发现灯L2比L1亮,关于该电路分析正确的是( )| A. | 通过L2的电流比L1的电流大 | B. | L2的电阻比L1的电阻大 | ||
| C. | L2两端电压比L1两端电压小 | D. | L2的实际功率比L1的实际功率小 |
7.下列四种动物的运动方式能用压强与流速关系来解释的是( )
| A. |  乌贼向后喷水而前行 | B. |  流线型的鲫鱼在水中快速前进 | ||
| C. |  展开双翅的鸟在空中滑翔 | D. |  壁虎靠脚上的“吸盘”在墙上爬行 |
6.垫排球是我市一项体育测试项目,下列对排球离开后继续上升过程分析正确的是( )
0 176617 176625 176631 176635 176641 176643 176647 176653 176655 176661 176667 176671 176673 176677 176683 176685 176691 176695 176697 176701 176703 176707 176709 176711 176712 176713 176715 176716 176717 176719 176721 176725 176727 176731 176733 176737 176743 176745 176751 176755 176757 176761 176767 176773 176775 176781 176785 176787 176793 176797 176803 176811 235360
| A. | 速度越来越小 | B. | 受到的重力越来越大 | ||
| C. | 到达最高点时受力平衡 | D. | 球受到惯性作用 |