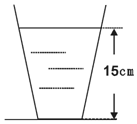
 如图所示,铁桶重为20N,桶的底面积为400cm2,往桶里倒入8kg的水,水的深度为15cm,平放在面积为1m2的水平台面上(取g=10N/kg),求
如图所示,铁桶重为20N,桶的底面积为400cm2,往桶里倒入8kg的水,水的深度为15cm,平放在面积为1m2的水平台面上(取g=10N/kg),求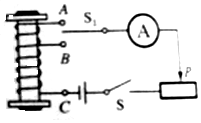 在研究电磁铁特性的实验中,小明组成了如图所示的电路,并进行了如下操作
在研究电磁铁特性的实验中,小明组成了如图所示的电路,并进行了如下操作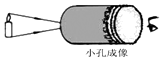 如图所示,找一个空的易拉罐,用钉子在易拉罐底部的中央敲一个小孔,将易拉罐的顶部剪去后,蒙上一层塑料薄膜,这样就制成了一个针孔照相机,其实就是小孔成像的实验装置,将点燃的蜡烛置于小孔前的适当位置,观察并研究小孔成像的特点:
如图所示,找一个空的易拉罐,用钉子在易拉罐底部的中央敲一个小孔,将易拉罐的顶部剪去后,蒙上一层塑料薄膜,这样就制成了一个针孔照相机,其实就是小孔成像的实验装置,将点燃的蜡烛置于小孔前的适当位置,观察并研究小孔成像的特点: 如图甲、乙分别是常温下进行的“探究冰、蜡烛熔化特点”的实验装置,在实验中为了测量时间还需要的实验器材是秒表,甲装置缺少酒精灯加热是正确(正确/错误)的;采用乙装置加热方式的优点是使加热物体受热均匀,根据探究过程可知,冰熔化时温度不变(升高/不变/降低),具有这种熔化特点的固体叫晶体(晶体/非晶体).
如图甲、乙分别是常温下进行的“探究冰、蜡烛熔化特点”的实验装置,在实验中为了测量时间还需要的实验器材是秒表,甲装置缺少酒精灯加热是正确(正确/错误)的;采用乙装置加热方式的优点是使加热物体受热均匀,根据探究过程可知,冰熔化时温度不变(升高/不变/降低),具有这种熔化特点的固体叫晶体(晶体/非晶体).
10. 在探究“杠杆平衡条件”的实验中:
在探究“杠杆平衡条件”的实验中:
(1)实验前,将杠杆的中点置于支架上,当杠杆静止时发现杠杆左低右高.为了使杠杆在水平位置平衡,可以将两端的平衡螺母向右调.
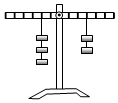
(2)在杠杆的两端加挂钩码,并移动钩码,使杠杆在水平位置平衡,如图所示,并测出力臂.多次实验并把数据记录在表格中.
实验时杠杆在水平位置平衡的目的是:测量力臂;
多次实验的目的是:使结论具有普遍性.
(3)根据以上数据可得出杠杆平衡的条件是:动力×动力臂=阻力×阻力臂.小明根据第3次实验得出“动力+动力臂=阻力+阻力臂”,他犯到的错误是不同的两个物理量不能相加.
(4)将图中杠杆两侧的钩码各取下一个,杠杆会左侧下降(选填“右侧下降”或“左侧下降”).
(5)若只将图中杠杆左侧的两个钩码取下,要使杠杆重新在水平位置平衡,应将右侧钩码向左移动2格(说出钩码移动的方向及格数).
0 173676 173684 173690 173694 173700 173702 173706 173712 173714 173720 173726 173730 173732 173736 173742 173744 173750 173754 173756 173760 173762 173766 173768 173770 173771 173772 173774 173775 173776 173778 173780 173784 173786 173790 173792 173796 173802 173804 173810 173814 173816 173820 173826 173832 173834 173840 173844 173846 173852 173856 173862 173870 235360
在探究“杠杆平衡条件”的实验中:(1)实验前,将杠杆的中点置于支架上,当杠杆静止时发现杠杆左低右高.为了使杠杆在水平位置平衡,可以将两端的平衡螺母向右调.
(2)在杠杆的两端加挂钩码,并移动钩码,使杠杆在水平位置平衡,如图所示,并测出力臂.多次实验并把数据记录在表格中.
| 次数 | F1/N | l1/cm | F2/N | l2/cm |
| 1 | 1 | 10 | 2 | 5 |
| 2 | 2 | 10 | 1 | 20 |
| 3 | 4 | 5 | 5 | 4 |
多次实验的目的是:使结论具有普遍性.
(3)根据以上数据可得出杠杆平衡的条件是:动力×动力臂=阻力×阻力臂.小明根据第3次实验得出“动力+动力臂=阻力+阻力臂”,他犯到的错误是不同的两个物理量不能相加.
(4)将图中杠杆两侧的钩码各取下一个,杠杆会左侧下降(选填“右侧下降”或“左侧下降”).
(5)若只将图中杠杆左侧的两个钩码取下,要使杠杆重新在水平位置平衡,应将右侧钩码向左移动2格(说出钩码移动的方向及格数).
 在如图所示的电路中,电源电压为3V.闭合开关S,电流表A1的示数为0.9A,电流表A2的示数为0.3A,计算:
在如图所示的电路中,电源电压为3V.闭合开关S,电流表A1的示数为0.9A,电流表A2的示数为0.3A,计算: