题目内容
8.探究杠杆平衡条件实验时,首先应该调节杠杆的平衡螺母,使杠杆在水平位置平衡,这是为了实验过程中便于直接读出力臂值;在实验中改变支点两侧的钩码位置和个数,用同样的方法一般要做多次,得到多组数据并进行分析.这样做的目的是使实验结论具有普遍性.分析 (1)杠杆在水平位置平衡,好处有二:一是杠杆的重心在支点上,二是两边支点到力的悬挂点距离为力臂,便于力臂的测量;
(2)任何实验,都要多做几次,得到多组数据,分析得出普遍性的规律.
解答 解:(1)杠杆在水平位置平衡,所有的拉力均竖直向下,力臂为支点到力的作用点的距离,以便于力臂的测量;
(2)实验时用同样的方法做多次,得到多组数据并进行分析,得到的规律说服性强.
故答案为:便于直接读出力臂值;使实验结论具有普遍性.
点评 本题主要考查了杠杆在水平位置平衡的原因和平衡如何调节.杠杆平衡条件是杠杆平衡问题的重要依据,当杠杆符合平衡条件时,杠杆平衡;条件不符合时,力和力臂乘积大的一端下沉.

练习册系列答案
相关题目
1. 请在图的两个虚线框内,选填“电源”和“电流表”的符号,并满足当开关都闭合时两灯都能发光,以下四种选择的情况符合电路要求的是( )
请在图的两个虚线框内,选填“电源”和“电流表”的符号,并满足当开关都闭合时两灯都能发光,以下四种选择的情况符合电路要求的是( )
请在图的两个虚线框内,选填“电源”和“电流表”的符号,并满足当开关都闭合时两灯都能发光,以下四种选择的情况符合电路要求的是( )| A. | 上是电流表,下也是电流表 | B. | 上是电流表,下是电源 | ||
| C. | 上是电源,下是电流表 | D. | 无法判断 |
19. 如图甲所示的电路中,当滑片P由b移动到a的过程中,电压表示数U及滑动变阻器接入电路的电阻R2的变化情况如图乙所示,下列说法不正确的是( )
如图甲所示的电路中,当滑片P由b移动到a的过程中,电压表示数U及滑动变阻器接入电路的电阻R2的变化情况如图乙所示,下列说法不正确的是( )
如图甲所示的电路中,当滑片P由b移动到a的过程中,电压表示数U及滑动变阻器接入电路的电阻R2的变化情况如图乙所示,下列说法不正确的是( )| A. | 当滑片P移动到a端时,通过R1的电流为0.3A | |
| B. | 当滑片P移动到a端时,R1消耗的功率为0.4W | |
| C. | 当滑片P移动到b端时,R2两端的电压为0 | |
| D. | 电阻R2的阻值为10Ω |
3.甲、乙两台机器做功,甲做了600J功,用了2分钟,乙做了300J功,用了30秒,下列说法正确的是( )
| A. | 甲比乙做功快 | B. | 甲比乙功率大 | ||
| C. | 甲比乙做功多 | D. | 甲、乙功率之比为2:1 |
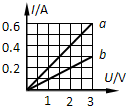 在探究通过导体的电流与其两端电压的关系时,将记录的实验数据通过整理做出了如图所示的图象.当在导体a的两端加上1V的电压时,通过导体a的电流为0.2A,当在导体a的两端加上3V的电压时,通过导体a的电流为0.6A,分析图象可得出结论:电阻一定时,通过的电流跟两端的电压成正比;由图还可看出,b的电阻较大.(填“a”或“b”)
在探究通过导体的电流与其两端电压的关系时,将记录的实验数据通过整理做出了如图所示的图象.当在导体a的两端加上1V的电压时,通过导体a的电流为0.2A,当在导体a的两端加上3V的电压时,通过导体a的电流为0.6A,分析图象可得出结论:电阻一定时,通过的电流跟两端的电压成正比;由图还可看出,b的电阻较大.(填“a”或“b”) 如图所示的杠杆每个小格的长度相等,质量不计,O为杠杆的支点,物体A是边长为0.1m的正方体.当杠杆右侧挂一个重为4N的物体B时,杠杆平衡.此时物体A对水平地面的压强为300Pa,则物体A的密度为0.5×103kg/m3(g=10N/kg).
如图所示的杠杆每个小格的长度相等,质量不计,O为杠杆的支点,物体A是边长为0.1m的正方体.当杠杆右侧挂一个重为4N的物体B时,杠杆平衡.此时物体A对水平地面的压强为300Pa,则物体A的密度为0.5×103kg/m3(g=10N/kg).
17.某课外兴趣小组的同学们为了研究蜗牛的运动情况,将蜗牛放在刻度尺上让其沿刻度尺爬行,并每隔10s拍摄记录蜗牛的位置,拼成如图所示的图片.同学们依据此图片获得数据,如表:

(1)你根据图中的情景,把表格中的内容补充完整.
(2)根据上表的数据,你可得出蜗牛是做变速运动,整个50s内的平均速度是1.2m/s.
| 照片序号 | 1 | 2 | 3 | 4 | 5 | 6 |
| 时间t/s | 0 | 10 | 20 | 30 | 40 | 50 |
| 路程s/mm | 0 | 12.0 | 22.2 | 48.9 | 61.5 |
(2)根据上表的数据,你可得出蜗牛是做变速运动,整个50s内的平均速度是1.2m/s.
18.某学校的同学们在探究“并联电路中干路电流与支路电流有什么关系”.

(1)小丽同学进行探究实验的电路如图甲所示,请你用笔画线表示导线,在图乙中连接测量A点电流时的实物电路图.
(2)小明所在小组的同学选用了一个“2.5V 0.3A”和一个“3.8V 0.3A”的小灯泡,按电路图连接电路前开关应处于断开状态,接着他正确操作电路测得了一组数据,那么他下面的操作应是换用不同规格的小灯泡,进行多次测量.
(3)实验中得到的结论是:并联电路中干路电流等于各支路电流之和.
(1)小丽同学进行探究实验的电路如图甲所示,请你用笔画线表示导线,在图乙中连接测量A点电流时的实物电路图.
(2)小明所在小组的同学选用了一个“2.5V 0.3A”和一个“3.8V 0.3A”的小灯泡,按电路图连接电路前开关应处于断开状态,接着他正确操作电路测得了一组数据,那么他下面的操作应是换用不同规格的小灯泡,进行多次测量.
| A点的电流IA/A | B点的电流IB/A | C点的电流IC/A | |
| 第一次测量 | 0.48 | 0.26 | 0.22 |
| 第二次测量 | 0.40 | 0.22 | 0.18 |