题目内容
13.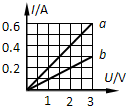 在探究通过导体的电流与其两端电压的关系时,将记录的实验数据通过整理做出了如图所示的图象.当在导体a的两端加上1V的电压时,通过导体a的电流为0.2A,当在导体a的两端加上3V的电压时,通过导体a的电流为0.6A,分析图象可得出结论:电阻一定时,通过的电流跟两端的电压成正比;由图还可看出,b的电阻较大.(填“a”或“b”)
在探究通过导体的电流与其两端电压的关系时,将记录的实验数据通过整理做出了如图所示的图象.当在导体a的两端加上1V的电压时,通过导体a的电流为0.2A,当在导体a的两端加上3V的电压时,通过导体a的电流为0.6A,分析图象可得出结论:电阻一定时,通过的电流跟两端的电压成正比;由图还可看出,b的电阻较大.(填“a”或“b”)
分析 (1)由I-U图象可以找出电压为1V和3V时,导体a所对应的电流;
(2)分析图象时应用控制变量法,当一个量随着另一个量的增大而增大,且其增大的倍数相等时,则成正比关系.
已知导体两端的电压与流过导体的电流,由欧姆定律可以求出导体的电阻;
(3)由I-U图象找出图象上某一点所对应的电压与电流,然后由欧姆定律求出导体的电阻,然后由串联电路的特点及欧姆定律可以求出两导体串联时的电流.
解答 解:(1)由I-U图象可知,电压为1V时,通过导体a的电流是0.1A;
由I-U图象可知,电压为3V时,通过导体a的电流是0.6A.
(2)根据由U-I图象可知,图线为过原点的直线,
可得出结论:电阻一定时,通过导体的电流跟导体两端的电压成正比关系.
(3)由I=$\frac{U}{R}$得,导体的电阻:R=$\frac{U}{I}$,
由图象知,当Ua=Ub时,通过导体的电流Ia>Ib,
所以导体的电阻Ra<Rb,即b的电阻较大.
故答案为:0.2A;0.6A;正比;b.
点评 本题考查了欧姆定律的简单应用,由图象找出电压与对应的电流,熟练应用欧姆定律是正确解题的关键.

练习册系列答案
 天天向上一本好卷系列答案
天天向上一本好卷系列答案 小学生10分钟应用题系列答案
小学生10分钟应用题系列答案
相关题目
6.以下对常见物体尺度的估测中正确的是( )
| A. | 物理课本的宽度约为16.9m | B. | 中学生的高度约为1.6cm | ||
| C. | 普通教室的高度约为4dm | D. | 自行车车轮直径约为0.8m |
7.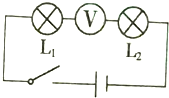 如图所示,粗心的小强把电压表串联在电路中,此时如果闭合开关,将会发生的现象是( )
如图所示,粗心的小强把电压表串联在电路中,此时如果闭合开关,将会发生的现象是( )
如图所示,粗心的小强把电压表串联在电路中,此时如果闭合开关,将会发生的现象是( )| A. | 电源短路 | B. | 电压表损坏 | C. | 电压表有示数 | D. | L2的灯丝烧断 |
1.下列单位中,是功单位的是( )
| A. | 焦耳 | B. | 千瓦 | C. | 瓦特 | D. | 焦耳/秒 |

2.如图所示,电源电压不变,先将开关S1闭合,再闭合S2,则( )

| A. | L1亮度变暗,电流表示实数变小 | B. | L1亮度变暗,电流表实数不变 | ||
| C. | L1亮度不变,电流表示数变大 | D. | L1亮度不变,电流表示数不变 |
3. 在探究杠杆平衡条件的实验中:
在探究杠杆平衡条件的实验中:
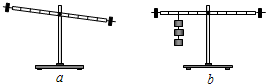
(1)如图a所示,要使杠杆在水平位置平衡,可将杠杆左端的平衡螺母向左调节,也可将杠杆右端的平衡螺母向左调节.杠杆在水平位置平衡,此时杠杆自身重力的力臂为零.
(2)调节平衡后,在以下实验过程中不需要(选填“需要”或“不需要”)再调节平衡螺母.如图b所示,左侧挂上钩码,在右侧用弹簧测力计(图中未画出)拉杠杆,使其在水平位置平衡,为便于测量力臂,应使弹簧测力计拉力的方向竖直向下.
(3)若操作过程中,当弹簧测力计的示数达到量程仍不能使杠杆水平平衡,你认为接下来合理的操作是减少左侧钩码的数量或者左侧钩码右移.(写出一条即可)
(4)实验中测得的数据如表所示,填写好表格中漏填的数据①20和 ②1.
(5)有的同学按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”.这个结论与杠杆平衡条件不符,原因是实验过程中B(填字母).
A.没有改变力的大小 B.没有改变力的方向
C.没有改变力的作用点 D.实验次数较少,结论具有偶然性.
在探究杠杆平衡条件的实验中:(1)如图a所示,要使杠杆在水平位置平衡,可将杠杆左端的平衡螺母向左调节,也可将杠杆右端的平衡螺母向左调节.杠杆在水平位置平衡,此时杠杆自身重力的力臂为零.
(2)调节平衡后,在以下实验过程中不需要(选填“需要”或“不需要”)再调节平衡螺母.如图b所示,左侧挂上钩码,在右侧用弹簧测力计(图中未画出)拉杠杆,使其在水平位置平衡,为便于测量力臂,应使弹簧测力计拉力的方向竖直向下.
(3)若操作过程中,当弹簧测力计的示数达到量程仍不能使杠杆水平平衡,你认为接下来合理的操作是减少左侧钩码的数量或者左侧钩码右移.(写出一条即可)
(4)实验中测得的数据如表所示,填写好表格中漏填的数据①20和 ②1.
| 测量序号 | 动力F1/N | 动力臂l1/cm | 阻力F2/N | 阻力臂l2/cm |
| (1) | 1 | ① | 2 | 10 |
| (2) | 2 | 15 | 1.5 | 20 |
| (3) | 3 | 5 | ② | 15 |
A.没有改变力的大小 B.没有改变力的方向
C.没有改变力的作用点 D.实验次数较少,结论具有偶然性.