题目内容
17. 光电鼠标的原理就是利用发光二极管照射鼠标垫(如图),并被反射回鼠标的光学感应器(相当于光屏),用以记录移动动作,以此捕捉移动位置的不同画面.图中光学感应器、透镜、发光二极管等元件固定在鼠标内,当发光二极管的光照射在粗糙的鼠标垫上时会发生漫反射.若成像透镜距鼠标垫7mm,光学感应器距成像透镜3mm,则在光学感应器上所成的像是倒立(选填“倒立”或“正立”)、缩小(选填“放大”或“缩小”)的实像(选填“实像”或“虚像),当鼠标向前推移时,感光器件上的像相对于光学感应器在向前移动.
光电鼠标的原理就是利用发光二极管照射鼠标垫(如图),并被反射回鼠标的光学感应器(相当于光屏),用以记录移动动作,以此捕捉移动位置的不同画面.图中光学感应器、透镜、发光二极管等元件固定在鼠标内,当发光二极管的光照射在粗糙的鼠标垫上时会发生漫反射.若成像透镜距鼠标垫7mm,光学感应器距成像透镜3mm,则在光学感应器上所成的像是倒立(选填“倒立”或“正立”)、缩小(选填“放大”或“缩小”)的实像(选填“实像”或“虚像),当鼠标向前推移时,感光器件上的像相对于光学感应器在向前移动.
分析 (1)凸透镜成像规律中,当物距大于2倍焦距时,成的是倒立、缩小的实像.
(2)鼠标向前推移时,物向前推移,凸透镜所成的像也向前移动.
解答 解:(1)感应器连续拍摄鼠标垫表面所成的像是利用二倍焦距以外的物体成像的原理,因此光学感应器上所成的是倒立、缩小的实像;
(2)感应器成的是倒立、缩小的实像,鼠标向前推移时,物向前推移,感光器件上的像相对于光学感应器也向前移动.
故答案为:倒立;缩小;实像;前.
点评 本题考查了照相机成像原理的了解和掌握,要会结合材料提供的知识点进行分析解答,是一道理论联系实际的好题.

练习册系列答案
 智能训练练测考系列答案
智能训练练测考系列答案
相关题目
16.让一个凸透镜正对太阳光,在距透镜5cm处得到一个最小最亮的光斑.若将一个物体放在此透镜前7cm处,经这个凸透镜所成的像是( )
| A. | 缩小的实像 | B. | 放大的实像 | C. | 缩小的虚像 | D. | 放大的虚像 |
8.如图甲所示,放在水平地面上的物体,受到方向不变的水平拉力F的作用,F的大小与时间t的关系如图乙所示;物体运动的速度v与时间t的关系如图丙所示.则下列说法中正确的是( )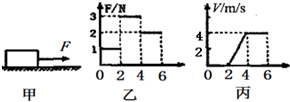
| A. | 0~2s内物体保持静止,不受摩擦力的作用 | |
| B. | 2~4s内物体做匀速直线运动 | |
| C. | 2~4s内物体受到的摩擦力为3N | |
| D. | 2~6s内物体受到的摩擦力大小保持不变 |


2. 某大学的两位研究生设计发明了“都市蚂蚁”概念车,如图所示,这款概念车小巧实用,有利于缓解都市交通拥堵,已知“都市蚂蚁”概念车的主要参数如表(g=10N/kg):
某大学的两位研究生设计发明了“都市蚂蚁”概念车,如图所示,这款概念车小巧实用,有利于缓解都市交通拥堵,已知“都市蚂蚁”概念车的主要参数如表(g=10N/kg):
(1)若每位乘员的质量均为60kg,求乘载两人的“都市蚂蚁”车对水平路面的压强为多大?
(2)若“都市蚂蚁”车发电机的输出功率为1000W,匀速行驶1×104m过程中做功为2×106J.则在此过程中“都市蚂蚁”车受到的牵引力是多大?“都市蚂蚁”车的行驶速度多大?
(3)航模社的同学想将此车改进成“水陆两栖蚂蚁车”.上述乘载两人的“都市蚂蚁”车若能浮在水面上,求露出水面的体积是多少?
某大学的两位研究生设计发明了“都市蚂蚁”概念车,如图所示,这款概念车小巧实用,有利于缓解都市交通拥堵,已知“都市蚂蚁”概念车的主要参数如表(g=10N/kg):| 质量m/kg | 400 |
| 轮胎与地面的总结出面积S/cm2 | 200 |
| 总体积V/m3 | 0.75 |
(2)若“都市蚂蚁”车发电机的输出功率为1000W,匀速行驶1×104m过程中做功为2×106J.则在此过程中“都市蚂蚁”车受到的牵引力是多大?“都市蚂蚁”车的行驶速度多大?
(3)航模社的同学想将此车改进成“水陆两栖蚂蚁车”.上述乘载两人的“都市蚂蚁”车若能浮在水面上,求露出水面的体积是多少?
6.关于机械效率,下列说法中正确的是( )
| A. | 功率大的机械,机械效率越高 | |
| B. | 机械效率越高的机械越省力 | |
| C. | 机械效率越低的机械,做的功就越少 | |
| D. | 由于有用功总小于总功,所以机械效率总小于100% |
 在“探究二力平衡的条件”实验中,小明选择了如图的装置,把小卡片两端细线绕过滑轮,并挂上钩码.
在“探究二力平衡的条件”实验中,小明选择了如图的装置,把小卡片两端细线绕过滑轮,并挂上钩码.