题目内容
5.根据指令[s,A](s≥0,0°≤A<180°)机器人在平面上能完成如下动作:先在原地逆时针旋转角度A,再朝其面对的方向沿直线行走距离s.现在机器人在平面直角坐标系的原点,且面对y轴的正方向,为使其移动到点(-3,3),应下的指令是[3$\sqrt{2}$,45°].分析 如图,利用坐标P(-3,3)的特点可得到OP=3$\sqrt{2}$,∠POy=45°,然后根据机器指令的表示方法求解.
解答 解:如图,∵P(-3,3),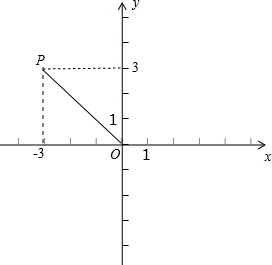
∴OP=3$\sqrt{2}$,∠POy=45°,
∵机器人在平面直角坐标系的原点,且面对y轴的正方向,
∴给机器下的指令为[3$\sqrt{2}$,45°].
故答案为[3$\sqrt{2}$,45°].
点评 本题考查了坐标与图形变化-旋转:图形或点旋转之后要结合旋转的角度和图形的特殊性质来求出旋转后的点的坐标.常见的是旋转特殊角度如:30°,45°,60°,90°,180°.也考查了阅读理解能力.

练习册系列答案
相关题目
13.下列运算正确的是( )
| A. | x3•x3=2x3 | B. | a8÷a4=a2 | C. | (-a3)2=a6 | D. | (3a2b)3=9a6b3 |
20.在同一直角坐标平面内,如果y=k1x与$y=\frac{k_2}{x}$没有交点,那么k1和k2的关系一定是( )
| A. | k1<0,k2>0 | B. | k1>0,k2<0 | C. | k1、k2同号 | D. | k1、k2异号 |