2. 图为某控制电路中,主要由电动势为E、内阻为r的电源与定值电阻R1、R2及电位器(滑动变阻器)R连接而成,L1、L2是红、绿两个指示灯.闭合开关S,当电位器的触头由弧形碳膜的中点逆时针滑向a端时,则( )
图为某控制电路中,主要由电动势为E、内阻为r的电源与定值电阻R1、R2及电位器(滑动变阻器)R连接而成,L1、L2是红、绿两个指示灯.闭合开关S,当电位器的触头由弧形碳膜的中点逆时针滑向a端时,则( )
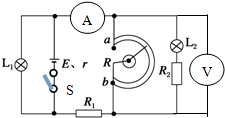
图为某控制电路中,主要由电动势为E、内阻为r的电源与定值电阻R1、R2及电位器(滑动变阻器)R连接而成,L1、L2是红、绿两个指示灯.闭合开关S,当电位器的触头由弧形碳膜的中点逆时针滑向a端时,则( )| A. | L1、L2指示灯都变亮 | B. | L1、L2指示灯都变暗 | ||
| C. | 电流表示数变大 | D. | 电压表示数变大 |
1. 如图所示,一小球从距竖直弹簧一定高度静止释放,与弹簧接触后压缩弹簧到最低点(设此点小球的重力势能为0).在此过程中,小球重力势能和动能的最大值分别为Ep和Ek,弹簧弹性势能的最大值为E′p则它们之间的关系为( )
如图所示,一小球从距竖直弹簧一定高度静止释放,与弹簧接触后压缩弹簧到最低点(设此点小球的重力势能为0).在此过程中,小球重力势能和动能的最大值分别为Ep和Ek,弹簧弹性势能的最大值为E′p则它们之间的关系为( )
如图所示,一小球从距竖直弹簧一定高度静止释放,与弹簧接触后压缩弹簧到最低点(设此点小球的重力势能为0).在此过程中,小球重力势能和动能的最大值分别为Ep和Ek,弹簧弹性势能的最大值为E′p则它们之间的关系为( )| A. | Ep=E′p>Ek | B. | Ep>Ek>E′p | C. | Ep=Ek+E′p | D. | Ep+Ek=E′p |
 高空侦察机可进行高空侦察,导弹则是打击高空侦察机的有力武器.假设某日有一架高空侦察机正以300m/s的速度向某城市飞来,它通过该城市上空的A点.某导弹基地通过雷达探测并计算高空侦察机的飞行规律,在高空侦察机离A点尚有一段距离时竖直向上发射导弹,导弹以80m/s2的加速度做竖直向上做匀加速直线运动,以1200m/s的速度在A点击中敌机,求:
高空侦察机可进行高空侦察,导弹则是打击高空侦察机的有力武器.假设某日有一架高空侦察机正以300m/s的速度向某城市飞来,它通过该城市上空的A点.某导弹基地通过雷达探测并计算高空侦察机的飞行规律,在高空侦察机离A点尚有一段距离时竖直向上发射导弹,导弹以80m/s2的加速度做竖直向上做匀加速直线运动,以1200m/s的速度在A点击中敌机,求:
19.如图所示,电动势为E,内阻不计的电源与三个灯泡和三个电阻相接.只合上开关S1,三个灯泡都能正常工作.如果再合上S2,则下列表述正确的是( )
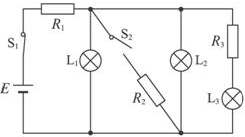
| A. | 电源输出功率减小 | B. | L1上消耗的功率增大 | ||
| C. | 通过R1上的电流增大 | D. | 通过R3上的电流增大 |
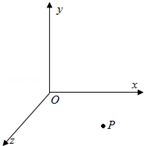 如图所示,在正交坐标系Oxyz中,分布着电场和磁场(图中未画出).在Oyz平面的左方空间内存在沿y轴负方向、磁感应强度大小为B的匀强磁场;在Oyz平面右方、Oxz平面上方的空间内分布着沿z轴负方向、磁感应强度大小也为B匀强磁场;在Oyz平面右方、Oxz平面下方分布着沿y轴正方向的匀强电场.在t=0时刻,一质量为m、电荷量为+q的微粒从P点静止释放,已知P点的坐标为(5a,-2a,0),电场强度大小为$\frac{aq{B}^{2}}{4m}$,不计微粒的重力.求:
如图所示,在正交坐标系Oxyz中,分布着电场和磁场(图中未画出).在Oyz平面的左方空间内存在沿y轴负方向、磁感应强度大小为B的匀强磁场;在Oyz平面右方、Oxz平面上方的空间内分布着沿z轴负方向、磁感应强度大小也为B匀强磁场;在Oyz平面右方、Oxz平面下方分布着沿y轴正方向的匀强电场.在t=0时刻,一质量为m、电荷量为+q的微粒从P点静止释放,已知P点的坐标为(5a,-2a,0),电场强度大小为$\frac{aq{B}^{2}}{4m}$,不计微粒的重力.求:
17. 如图所示,轻杆长为3L,在杆的A、B两端分别固定质量均为m的球A和球B,杆上距球A为L处的点O装在光滑的水平转动轴上,外界给予系统一定的能量后,杆和球在竖直面内转动.在转动的过程中,忽略空气的阻力.若球B运动到最高点时,球B对杆恰好无作用力,则下列说法正确的是( )
如图所示,轻杆长为3L,在杆的A、B两端分别固定质量均为m的球A和球B,杆上距球A为L处的点O装在光滑的水平转动轴上,外界给予系统一定的能量后,杆和球在竖直面内转动.在转动的过程中,忽略空气的阻力.若球B运动到最高点时,球B对杆恰好无作用力,则下列说法正确的是( )
如图所示,轻杆长为3L,在杆的A、B两端分别固定质量均为m的球A和球B,杆上距球A为L处的点O装在光滑的水平转动轴上,外界给予系统一定的能量后,杆和球在竖直面内转动.在转动的过程中,忽略空气的阻力.若球B运动到最高点时,球B对杆恰好无作用力,则下列说法正确的是( )| A. | 球B在最高点时速度为零 | B. | 球B在最高点时,球A的速度为$\frac{\sqrt{2gL}}{2}$ | ||
| C. | 球B转到最低点时,其速度为$\sqrt{\frac{26}{5}gL}$ | D. | 球B转到最低点时,其速度为$\sqrt{\frac{16}{5}gL}$ |
16. 2014年3月8日凌晨马航客机失联后,北京卫星测控中心紧急调动海洋、风云、高分、遥感4个型号近10颗卫星,为海面搜救提供技术支持,特别是“高分一号”突破了空间分辨率、多光谱与大覆盖面积相结合的多项关键核心技术.如图所示为“高分一号”与北斗导航系统两颗工作卫星在太空同一轨道面内运动的示意图,北斗导航系统中两颗卫星“B1”和“B2”以及“高分一号”均可认为绕地心O做匀速圆周运动,卫星“B1”和“B2”的轨道半径均为r;某时刻北斗导航系统两颗工作卫星分别位于轨道上的M、N两位置,两者轨道半径夹角为600,“高分一号”在C位置.卫星均顺时针运行,地球表面的重力加速度为g,地球半径为R,则下列说法正确的是( )
2014年3月8日凌晨马航客机失联后,北京卫星测控中心紧急调动海洋、风云、高分、遥感4个型号近10颗卫星,为海面搜救提供技术支持,特别是“高分一号”突破了空间分辨率、多光谱与大覆盖面积相结合的多项关键核心技术.如图所示为“高分一号”与北斗导航系统两颗工作卫星在太空同一轨道面内运动的示意图,北斗导航系统中两颗卫星“B1”和“B2”以及“高分一号”均可认为绕地心O做匀速圆周运动,卫星“B1”和“B2”的轨道半径均为r;某时刻北斗导航系统两颗工作卫星分别位于轨道上的M、N两位置,两者轨道半径夹角为600,“高分一号”在C位置.卫星均顺时针运行,地球表面的重力加速度为g,地球半径为R,则下列说法正确的是( )
2014年3月8日凌晨马航客机失联后,北京卫星测控中心紧急调动海洋、风云、高分、遥感4个型号近10颗卫星,为海面搜救提供技术支持,特别是“高分一号”突破了空间分辨率、多光谱与大覆盖面积相结合的多项关键核心技术.如图所示为“高分一号”与北斗导航系统两颗工作卫星在太空同一轨道面内运动的示意图,北斗导航系统中两颗卫星“B1”和“B2”以及“高分一号”均可认为绕地心O做匀速圆周运动,卫星“B1”和“B2”的轨道半径均为r;某时刻北斗导航系统两颗工作卫星分别位于轨道上的M、N两位置,两者轨道半径夹角为600,“高分一号”在C位置.卫星均顺时针运行,地球表面的重力加速度为g,地球半径为R,则下列说法正确的是( )| A. | 北斗导航卫星“B1”和“B2”的加速度大小为$\frac{r}{R}$g | |
| B. | 如果要调动“高分一号”卫星尽快到达N位置的下方,必须使其加速 | |
| C. | 卫星B1由M运动到N所需要的时间为t=$\frac{πr}{3R}\sqrt{\frac{r}{R}}$. | |
| D. | 若“高分一号”所在高度处有稀薄气体,则运行一段时间后,其机械能会增大 |
15.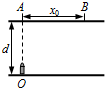 一艘小船要从O点渡过一条两岸平行、宽度为d=100m的河流,已知河水流速为v1=4m/s,小船在静水中的速度为v2=2m/s,B点距正对岸的A点x0=173m.下面关于该船渡河的判断,其中正确的是( )
一艘小船要从O点渡过一条两岸平行、宽度为d=100m的河流,已知河水流速为v1=4m/s,小船在静水中的速度为v2=2m/s,B点距正对岸的A点x0=173m.下面关于该船渡河的判断,其中正确的是( )
0 148384 148392 148398 148402 148408 148410 148414 148420 148422 148428 148434 148438 148440 148444 148450 148452 148458 148462 148464 148468 148470 148474 148476 148478 148479 148480 148482 148483 148484 148486 148488 148492 148494 148498 148500 148504 148510 148512 148518 148522 148524 148528 148534 148540 148542 148548 148552 148554 148560 148564 148570 148578 176998
一艘小船要从O点渡过一条两岸平行、宽度为d=100m的河流,已知河水流速为v1=4m/s,小船在静水中的速度为v2=2m/s,B点距正对岸的A点x0=173m.下面关于该船渡河的判断,其中正确的是( )| A. | 小船过河的最短航程为100m | |
| B. | 小船过河的最短时间为25s | |
| C. | 小船可以在对岸A、B两点间任意一点靠岸 | |
| D. | 小船过河的最短航程为200m |
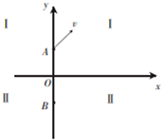 如图,在区域Ⅰ(即y≥0)和区域Ⅱ(即y<0)内分别存在匀强磁场,磁场方向相同且垂直于Oxy平面,区域Ⅰ磁场的磁感应强度是区域Ⅱ磁场感应强度的2倍,一带电粒子某时刻从y轴的A点以速度v斜射入磁场,在磁场中顺时针偏转后在y轴的B点射出,射出时速度的方向与y轴垂直.已知A点、B点到O点的距离均为d.不计粒子重力
如图,在区域Ⅰ(即y≥0)和区域Ⅱ(即y<0)内分别存在匀强磁场,磁场方向相同且垂直于Oxy平面,区域Ⅰ磁场的磁感应强度是区域Ⅱ磁场感应强度的2倍,一带电粒子某时刻从y轴的A点以速度v斜射入磁场,在磁场中顺时针偏转后在y轴的B点射出,射出时速度的方向与y轴垂直.已知A点、B点到O点的距离均为d.不计粒子重力