0 18983 18991 18997 19001 19007 19009 19013 19019 19021 19027 19033 19037 19039 19043 19049 19051 19057 19061 19063 19067 19069 19073 19075 19077 19078 19079 19081 19082 19083 19085 19087 19091 19093 19097 19099 19103 19109 19111 19117 19121 19123 19127 19133 19139 19141 19147 19151 19153 19159 19163 19169 19177 176998
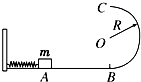 如图所示,光滑水平面AB与竖直面内的光滑半圆形导轨在B点相接,导轨半径为R.一个质量为m的物体将弹簧压缩至A点后由静止释放,在弹力作用下物体获得某一向右速度后脱离弹簧,之后向上运动恰能完成半个圆周运动到达C点.试求:
如图所示,光滑水平面AB与竖直面内的光滑半圆形导轨在B点相接,导轨半径为R.一个质量为m的物体将弹簧压缩至A点后由静止释放,在弹力作用下物体获得某一向右速度后脱离弹簧,之后向上运动恰能完成半个圆周运动到达C点.试求: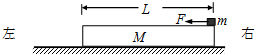 如图所示,质量为M=4kg的木板静止在光滑的水平面上,在木板的右端放置一个质量m=1kg大小可以忽略的铁块,铁块与木板之间的摩擦因数μ=0.4,在铁块上加一个水平向左的恒力F=8N,铁块在长L=6m的木板上滑动.取g=10m/s2.求:
如图所示,质量为M=4kg的木板静止在光滑的水平面上,在木板的右端放置一个质量m=1kg大小可以忽略的铁块,铁块与木板之间的摩擦因数μ=0.4,在铁块上加一个水平向左的恒力F=8N,铁块在长L=6m的木板上滑动.取g=10m/s2.求: 如图所示,AC、BD为圆的两条互相垂直的直径,圆心为O,半径为r,将带等电荷量的正、负点电荷放在圆周上,它们的位置关于AC对称,+q与O点的连线和OC夹角为30°,求 O点处的场强?
如图所示,AC、BD为圆的两条互相垂直的直径,圆心为O,半径为r,将带等电荷量的正、负点电荷放在圆周上,它们的位置关于AC对称,+q与O点的连线和OC夹角为30°,求 O点处的场强?
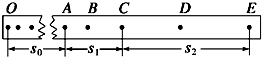 (1)根据打出的纸带,如图,选取纸带上打出的连续五个点A、B、C、D、E,测出A点距起点O的距离为s0,点A、C间的距离为s1,点C、E间的距离为s2,交流电的周期为T,则根据这些条件计算重锤下落的加速度a的表达式为:a=
(1)根据打出的纸带,如图,选取纸带上打出的连续五个点A、B、C、D、E,测出A点距起点O的距离为s0,点A、C间的距离为s1,点C、E间的距离为s2,交流电的周期为T,则根据这些条件计算重锤下落的加速度a的表达式为:a= 如图所示,质量为M=5kg的箱子B置于光滑水平面上,箱子底板上放一质量为m2=1kg的物体C,质量为m1=2kg的物体A经跨过定滑轮的轻绳与箱子B相连,在A加速下落的过程中,C与箱子B始终保持相对静止.不计定滑轮的质量和一切阻力,取g=10m/s2,下列正确的是( )
如图所示,质量为M=5kg的箱子B置于光滑水平面上,箱子底板上放一质量为m2=1kg的物体C,质量为m1=2kg的物体A经跨过定滑轮的轻绳与箱子B相连,在A加速下落的过程中,C与箱子B始终保持相对静止.不计定滑轮的质量和一切阻力,取g=10m/s2,下列正确的是( )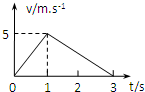 质量为2kg的物体静止在水平面上,现用一恒力沿水平方向拉着物体运动1s后撤去拉力,物体运动的v-t图象如图所示.以下说法正确的是( )
质量为2kg的物体静止在水平面上,现用一恒力沿水平方向拉着物体运动1s后撤去拉力,物体运动的v-t图象如图所示.以下说法正确的是( )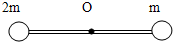 如图所示,一长为2L的轻杆中央有一光滑的小孔O,两端各固定质量为2m和m的A、B两个小球,光滑的铁钉穿过小孔垂直钉在竖直的墙壁上,将轻杆从水平位置由静止释放,转到竖直位置,在转动的过程中,忽略一切阻力.下列说法正确的是( )
如图所示,一长为2L的轻杆中央有一光滑的小孔O,两端各固定质量为2m和m的A、B两个小球,光滑的铁钉穿过小孔垂直钉在竖直的墙壁上,将轻杆从水平位置由静止释放,转到竖直位置,在转动的过程中,忽略一切阻力.下列说法正确的是( )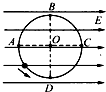 如图所示,竖直放置的光滑绝缘圆环穿有一带正电的小球,匀强电场水平向右,小球绕O点作圆周运动,那么以下错误的( )
如图所示,竖直放置的光滑绝缘圆环穿有一带正电的小球,匀强电场水平向右,小球绕O点作圆周运动,那么以下错误的( ) 如图所示,质量均为m的物块A和B叠放在一轻弹簧上,用一竖直向下的力F压A,使弹簧又被压缩一段.在突然撤去F的瞬间,A与B间的相互作用力的大小为( )
如图所示,质量均为m的物块A和B叠放在一轻弹簧上,用一竖直向下的力F压A,使弹簧又被压缩一段.在突然撤去F的瞬间,A与B间的相互作用力的大小为( )