14.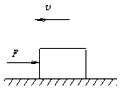 如图所示,质量为10kg的物体,在水平地面上向左运动.物体与水平面间的动摩擦因数为0.3与此同时,物体受到一个水平向右的推力F=30N的作用,则物体的加速度为( )(g取10m/s2)
如图所示,质量为10kg的物体,在水平地面上向左运动.物体与水平面间的动摩擦因数为0.3与此同时,物体受到一个水平向右的推力F=30N的作用,则物体的加速度为( )(g取10m/s2)
如图所示,质量为10kg的物体,在水平地面上向左运动.物体与水平面间的动摩擦因数为0.3与此同时,物体受到一个水平向右的推力F=30N的作用,则物体的加速度为( )(g取10m/s2)| A. | 2 m/s2,水平向右 | B. | 6m/s2,水平向右 | C. | 0 | D. | 6m/s2,水平向左 |
13.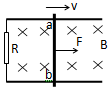 如图所示,两平行的光滑导轨固定在同一水平面内,两导轨间距离为L,金属棒ab垂直于导轨,金属棒两端与导轨接触良好,在导轨左端接入阻值为R的定值电阻,整个装置处于竖直向下的磁感应强度为B的匀强磁场中.与R相连的导线、导轨和金属棒的电阻均可忽略不计.用平行于导轨向右的大小为F的力拉金属棒,使金属棒以大小为v的速度向右匀速运动,( )
如图所示,两平行的光滑导轨固定在同一水平面内,两导轨间距离为L,金属棒ab垂直于导轨,金属棒两端与导轨接触良好,在导轨左端接入阻值为R的定值电阻,整个装置处于竖直向下的磁感应强度为B的匀强磁场中.与R相连的导线、导轨和金属棒的电阻均可忽略不计.用平行于导轨向右的大小为F的力拉金属棒,使金属棒以大小为v的速度向右匀速运动,( )
如图所示,两平行的光滑导轨固定在同一水平面内,两导轨间距离为L,金属棒ab垂直于导轨,金属棒两端与导轨接触良好,在导轨左端接入阻值为R的定值电阻,整个装置处于竖直向下的磁感应强度为B的匀强磁场中.与R相连的导线、导轨和金属棒的电阻均可忽略不计.用平行于导轨向右的大小为F的力拉金属棒,使金属棒以大小为v的速度向右匀速运动,( )| A. | 金属棒ab相当于电源,其a端相当于电源负极 | |
| B. | 拉力F=$\frac{{B}^{2}{L}^{2}v}{R}$ | |
| C. | 回路中的感应电流沿顺时针方向流动 | |
| D. | 定值电阻消耗的电功率P=Fv |
12.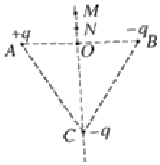 如图所示,一等边三角形的三个顶点A、B、C处分别放有+q、-q、-q的点电荷,过顶点C作AB边的垂线,M、N、O是AB的中垂线上的三点,且MN=NO,则下列正确的说法是( )
如图所示,一等边三角形的三个顶点A、B、C处分别放有+q、-q、-q的点电荷,过顶点C作AB边的垂线,M、N、O是AB的中垂线上的三点,且MN=NO,则下列正确的说法是( )
如图所示,一等边三角形的三个顶点A、B、C处分别放有+q、-q、-q的点电荷,过顶点C作AB边的垂线,M、N、O是AB的中垂线上的三点,且MN=NO,则下列正确的说法是( )| A. | M处的场强大于N处的场强 | |
| B. | M处的电势高于N处的电势 | |
| C. | M、N间的电势差大于N、O间的电势差 | |
| D. | 质子在M处的电势能大于在N处的电势能3 |
11. 如图所示,正八边形区域内有垂直于纸面的匀强磁场.一带电的粒子从h点沿he图示方向射入磁场区域,当速度大小为vb时,从b点离开磁场,在磁场中运动的时间为tb.当速度大小为vd时,从d点离开磁场,在磁场中运动的时间为td,不计粒子重力.则下列正确的说法是( )
如图所示,正八边形区域内有垂直于纸面的匀强磁场.一带电的粒子从h点沿he图示方向射入磁场区域,当速度大小为vb时,从b点离开磁场,在磁场中运动的时间为tb.当速度大小为vd时,从d点离开磁场,在磁场中运动的时间为td,不计粒子重力.则下列正确的说法是( )
如图所示,正八边形区域内有垂直于纸面的匀强磁场.一带电的粒子从h点沿he图示方向射入磁场区域,当速度大小为vb时,从b点离开磁场,在磁场中运动的时间为tb.当速度大小为vd时,从d点离开磁场,在磁场中运动的时间为td,不计粒子重力.则下列正确的说法是( )| A. | tb:td=2:1 | B. | tb:td=1:2 | C. | tb:td=3:1 | D. | tb:td=1:3 |
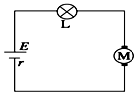 如图所示,电源电动势E=8V,内电阻为r=0.5Ω,“3V,3W”的灯泡L与电动机M串联接在电源上,灯泡刚好正常发光,电动机正常工作,电动机的线圈电阻R=1.5Ω.求:
如图所示,电源电动势E=8V,内电阻为r=0.5Ω,“3V,3W”的灯泡L与电动机M串联接在电源上,灯泡刚好正常发光,电动机正常工作,电动机的线圈电阻R=1.5Ω.求:
8. 如图所示,O1O2是半圆柱形玻璃体的对称面和纸面的交线,A、B是关于O1O2轴等距且平行的两束不同单色细光束,从玻璃体右方射出后的光路图如图所示.MN是垂直于O1O2放置的光屏,沿O1O2方向不断左右移动光屏,可在光屏上得到一个光斑P,根据该光路图,下列说法正确的是( )
如图所示,O1O2是半圆柱形玻璃体的对称面和纸面的交线,A、B是关于O1O2轴等距且平行的两束不同单色细光束,从玻璃体右方射出后的光路图如图所示.MN是垂直于O1O2放置的光屏,沿O1O2方向不断左右移动光屏,可在光屏上得到一个光斑P,根据该光路图,下列说法正确的是( )
如图所示,O1O2是半圆柱形玻璃体的对称面和纸面的交线,A、B是关于O1O2轴等距且平行的两束不同单色细光束,从玻璃体右方射出后的光路图如图所示.MN是垂直于O1O2放置的光屏,沿O1O2方向不断左右移动光屏,可在光屏上得到一个光斑P,根据该光路图,下列说法正确的是( )| A. | 该玻璃体对A光的折射率比对B光的折射率小 | |
| B. | A光的频率比B光的频率高 | |
| C. | 在该玻璃体中,A光比B光的速度大 | |
| D. | 在真空中,A光的波长比B光的波长长 |
7.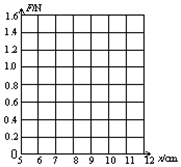 利用如图装置探究弹簧弹力和伸长量之间的关系.所用钩码每只的质量为30g.实验中,先测出不挂钩码时弹簧的自然长度,再将5个钩码逐个加挂在弹簧下端,稳定后测出相应的弹簧总长度,将数据填在表中.(弹簧质量不计且弹力始终未超过弹性限度,取g=9.8m/s2,所有结果均保留3位有效数字)
利用如图装置探究弹簧弹力和伸长量之间的关系.所用钩码每只的质量为30g.实验中,先测出不挂钩码时弹簧的自然长度,再将5个钩码逐个加挂在弹簧下端,稳定后测出相应的弹簧总长度,将数据填在表中.(弹簧质量不计且弹力始终未超过弹性限度,取g=9.8m/s2,所有结果均保留3位有效数字)
(1)挂三个钩码时弹簧弹力的大小为0.588N;
(2)根据实验数据将对应的弹力大小计算出来填入表内相应的空格内,并在坐标纸中作出弹簧弹力大小F跟弹簧总长度L之间的函数关系的图线(答题纸上只作图线);
(3)由图线求得该弹簧的劲度系数k=27N/m.
利用如图装置探究弹簧弹力和伸长量之间的关系.所用钩码每只的质量为30g.实验中,先测出不挂钩码时弹簧的自然长度,再将5个钩码逐个加挂在弹簧下端,稳定后测出相应的弹簧总长度,将数据填在表中.(弹簧质量不计且弹力始终未超过弹性限度,取g=9.8m/s2,所有结果均保留3位有效数字)| 数据记录组 | 1 | 2 | 3 | 4 | 5 | 6 |
| 钩码总质量(g) | 0 | 30 | 60 | 90 | 120 | 150 |
| 弹簧总长(cm) | 6.00 | 7.11 | 8.20 | 9.31 | 10.40 | 11.52 |
| 弹力大小(N) | 0 | 0.294 | 0.588 | 0.882 | 1.180 | 1.470 |
(2)根据实验数据将对应的弹力大小计算出来填入表内相应的空格内,并在坐标纸中作出弹簧弹力大小F跟弹簧总长度L之间的函数关系的图线(答题纸上只作图线);
(3)由图线求得该弹簧的劲度系数k=27N/m.
 如图所示,一圆柱形桶的高为d、底面直径$\sqrt{3}d$.当桶内无液体时,用一细束单色光从某点A沿桶口边缘恰好照射到桶底边缘上的某点B.当桶内液体的深度等于桶高的一半时,仍然从A点沿AB方向照射,恰好照射到桶底上的C点.C、B两点相距$\frac{{\sqrt{3}d}}{3}$,光在真空中的速度c=3.0×108m/s.求:
如图所示,一圆柱形桶的高为d、底面直径$\sqrt{3}d$.当桶内无液体时,用一细束单色光从某点A沿桶口边缘恰好照射到桶底边缘上的某点B.当桶内液体的深度等于桶高的一半时,仍然从A点沿AB方向照射,恰好照射到桶底上的C点.C、B两点相距$\frac{{\sqrt{3}d}}{3}$,光在真空中的速度c=3.0×108m/s.求:
5.如图1为用拉力传感器和速度传感器探究“加速度与物体受力的关系”实验装置.用拉力传感器记录小车受到拉力的大小,在长木板上相距L=48.0cm的A、B两点各安装一个速度传感器,分别记录小车到达A、B时的速率.

(1)实验主要步骤如下:
①将拉力传感器固定在小车上;
②平衡摩擦力,让小车在没有拉力作用时能向左做匀速直线运动;
③把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
④接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
⑤改变所挂钩码的数量,重复④的操作.
(2)表中记录了实验测得的几组数据,vB2-vA2是两个速度传感器记录速率的平方差,则加速度的表达式a=$\frac{{v}_{B}^{2}-{v}_{A}^{2}}{2L}$,请将表中第3次的实验数据填写完整(结果保留三位有效数字);
(3)本实验是否要求钩码的质量远远的小于小车的质量?不需要(选填:需要或不需要);由表中数据,已在图2坐标纸上作出a~F关系图线如图,同时作出理论计算得出的关系图线;对比实验结果与理论图线,造成上述偏差的原因是有平衡摩擦力或平衡摩擦力不足.
0 134806 134814 134820 134824 134830 134832 134836 134842 134844 134850 134856 134860 134862 134866 134872 134874 134880 134884 134886 134890 134892 134896 134898 134900 134901 134902 134904 134905 134906 134908 134910 134914 134916 134920 134922 134926 134932 134934 134940 134944 134946 134950 134956 134962 134964 134970 134974 134976 134982 134986 134992 135000 176998
(1)实验主要步骤如下:
①将拉力传感器固定在小车上;
②平衡摩擦力,让小车在没有拉力作用时能向左做匀速直线运动;
③把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
④接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
⑤改变所挂钩码的数量,重复④的操作.
(2)表中记录了实验测得的几组数据,vB2-vA2是两个速度传感器记录速率的平方差,则加速度的表达式a=$\frac{{v}_{B}^{2}-{v}_{A}^{2}}{2L}$,请将表中第3次的实验数据填写完整(结果保留三位有效数字);
| 次数 | F(N) | vB2-vA2(m2/s2) | a(m/s2) |
| 1 | 0.60 | 0.77 | 0.80 |
| 2 | 1.04 | 1.61 | 1.68 |
| 3 | 1.42 | 2.34 | 2.44 |
| 4 | 2.62 | 4.65 | 4.84 |
| 5 | 3.00 | 5.49 | 5.72 |