3.下列关于摩擦力的说法不正确的是( )
| A. | 静摩擦力可以提供动力 | |
| B. | 滑动摩擦力必然阻碍物体的相对运动 | |
| C. | 受静摩擦力的物体可以是运动的 | |
| D. | 滑动摩擦力方向一定与物体运动方向相反 |
2.关于弹力,下列说法正确的是( )
| A. | 物体只要相互接触就有弹力作用 | |
| B. | 压力或支持力的方向总是垂直于接触面指向被压或被支持的物体 | |
| C. | 静止放在桌面上的书,对桌面的压力就是书所受的重力 | |
| D. | 弹力的大小与物体受到的重力成正比 |
1.对于重力的理解,下列说法正确的是( )
| A. | 重力大小和物体运动状态有关 | |
| B. | 重力是由于地球的吸引而使物体受到的力 | |
| C. | 重力的方向总是垂直接触面向下的 | |
| D. | 把空气中的物体浸入水中,物体的重力变小 |
20. 光滑斜面长为L,一物体自斜面顶端由静止开始匀加速下滑到底端经历的时间为t,则( )
光滑斜面长为L,一物体自斜面顶端由静止开始匀加速下滑到底端经历的时间为t,则( )
光滑斜面长为L,一物体自斜面顶端由静止开始匀加速下滑到底端经历的时间为t,则( )| A. | 过程的平均速度是2L/t | |
| B. | 体到斜面中点时的瞬时速度小于L/t | |
| C. | 从开始运动到斜面中点经历的时间为t/2 | |
| D. | 在t/2时刻的瞬时速度是L/t |
19.下列关于加速度的说法,其中正确的是( )
| A. | 速度越大,加速度一定越大 | |
| B. | 速度的变化量越大,加速度一定越大 | |
| C. | 速度变化越快,加速度一定越大 | |
| D. | 速度为零,加速度一定为零 |
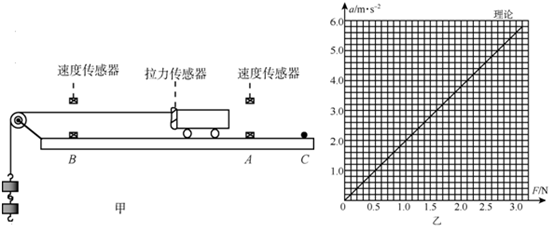
18.在研究加速度跟作用力和质量的关系时.
(1)可使物理的质量保持不变,研究加速度跟作用力的关系,这种方法属于控制变量法.现用如图所示的
装置探究“加速度与物体受力的关系”.小车所受拉力及其速度可分别由拉力传感器和速度传感器记录下来.速度传感器安装在距离L=48cm的长木板的a、b两点.
(2)下表中记录了实验测得的几组数据,vB2-vA2是两个速度传感器记录速率的平方差,则加速度的表达式 a=2.44m/s2(结果保留三位有效数字).
(3)如图所示的坐标纸上已经绘出了理论上的a-F图象.请根据表中数据,在坐标纸上作出由实验测得的a-F图线.
(4)对比实验结果与理论计算得到的两个关系图线,分析造成上述偏差的主要原因是没有完全平衡摩擦力或拉力传感器读数偏大.
(1)可使物理的质量保持不变,研究加速度跟作用力的关系,这种方法属于控制变量法.现用如图所示的
装置探究“加速度与物体受力的关系”.小车所受拉力及其速度可分别由拉力传感器和速度传感器记录下来.速度传感器安装在距离L=48cm的长木板的a、b两点.
(2)下表中记录了实验测得的几组数据,vB2-vA2是两个速度传感器记录速率的平方差,则加速度的表达式 a=2.44m/s2(结果保留三位有效数字).
| 次数 | F(N) | vB2-vA2(m2/s2) | a(m/s2) |
| 1 | 0.60 | 077 | 0.80 |
| 2 | 1.04 | 1.61 | 1.68 |
| 3 | 1,42 | 2.34 | |
| 4 | 2,62 | 4.65 | 4.84 |
| 5 | 3.00 | 5.49 | 5.72 |
(4)对比实验结果与理论计算得到的两个关系图线,分析造成上述偏差的主要原因是没有完全平衡摩擦力或拉力传感器读数偏大.
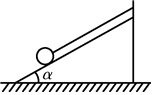 如图所示,斜面倾角为α=37°,斜面上边放一个质量m=2kg光滑小球,用与斜面平行的绳把小球系住,使系统以共同的速度向左作匀速运动,绳的拉力大小为12N,小球对斜面的压力大小为16N.
如图所示,斜面倾角为α=37°,斜面上边放一个质量m=2kg光滑小球,用与斜面平行的绳把小球系住,使系统以共同的速度向左作匀速运动,绳的拉力大小为12N,小球对斜面的压力大小为16N.
16.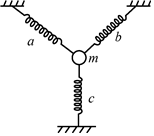 如图所示,质量为m的小球与三根相同的螺旋形轻弹簧相连.静止时相邻两弹簧间的夹角均为120°.此时弹簧a、b对小球的作用力均为F,且F≠$\frac{1}{2}$mg,则弹簧c对小球的作用力大小可能为( )
如图所示,质量为m的小球与三根相同的螺旋形轻弹簧相连.静止时相邻两弹簧间的夹角均为120°.此时弹簧a、b对小球的作用力均为F,且F≠$\frac{1}{2}$mg,则弹簧c对小球的作用力大小可能为( )
如图所示,质量为m的小球与三根相同的螺旋形轻弹簧相连.静止时相邻两弹簧间的夹角均为120°.此时弹簧a、b对小球的作用力均为F,且F≠$\frac{1}{2}$mg,则弹簧c对小球的作用力大小可能为( )| A. | F | B. | F+mg | C. | F-mg | D. | mg-F |
15.将已知力F分解成F1、F2两个分力,如果已知F1的大小及F2与F的夹角为θ.且θ<90°,则( )
| A. | 当F1<Fsinθ时,F2一定有两个解 | B. | 当F>F1>Fsinθ时,F2一定有两个解 | ||
| C. | 当F1<Fsinθ时,F2有唯一解 | D. | 当F1<Fsinθ时,F2无解 |
14.海军某潜艇在训练时竖直匀速下潜,向水底发射出持续时间为△t1的某脉冲声波信号,经过一段时间,该潜艇接受到了反射信号,持续时间为△t2,已知声波在水中的传播速度为v0,则潜艇的下潜速度为( )
0 134522 134530 134536 134540 134546 134548 134552 134558 134560 134566 134572 134576 134578 134582 134588 134590 134596 134600 134602 134606 134608 134612 134614 134616 134617 134618 134620 134621 134622 134624 134626 134630 134632 134636 134638 134642 134648 134650 134656 134660 134662 134666 134672 134678 134680 134686 134690 134692 134698 134702 134708 134716 176998
| A. | $\frac{△{t}_{1}-△{t}_{2}}{△{t}_{1}+△{t}_{2}}$v0 | B. | $\frac{△{t}_{1}+△{t}_{2}}{△{t}_{1}-△{t}_{2}}$v0 | ||
| C. | $\frac{△{t}_{1}{v}_{0}}{△{t}_{2}}$ | D. | $\frac{△{t}_{2}{v}_{0}}{△{t}_{1}}$ |