8.利用电流表和电压表测定一节干电池的电动势和内电阻.要求尽量减小实验误差.
(1)应该选择的实验电路是图a中的甲(填“甲”或“乙”).
(2)现有电流表(0~0.6A)、开关和导线若干,以及以下器材:
A.电压表(0~3V)
B.电压表(0~15V)
C.滑动变阻器(0~50Ω)
D.滑动变阻器(0~500Ω)
实验中电压表应选用A;滑动变阻器应选用C(选填相应器材前的字母).
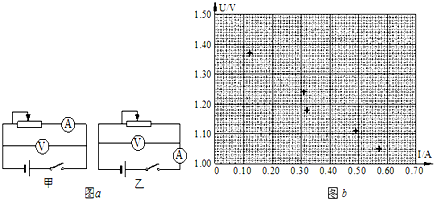
(3)某位同学记录的6组数据如表所示,其中5组数据的对应点已经标在图b的坐标纸上,请标出余下一组数据的对应点,并画出U-I图线(在答题纸上描点、作图).
(4)根据图线可得出干电池的电动势E=1.46V,内电阻r=0.70Ω(结果保留到小数点后两位).
(5)现有一个电动势为2.0V,内电阻为0.8Ω的蓄电池.若将该蓄电池与另一滑动变阻器(0~20Ω)串联组成闭合电路,当滑动变阻器接入电路的阻值为某一合适的值时,电源的输出功率最大,则电源的最大输出功率是Pm=1.25W.
(1)应该选择的实验电路是图a中的甲(填“甲”或“乙”).
(2)现有电流表(0~0.6A)、开关和导线若干,以及以下器材:
A.电压表(0~3V)
B.电压表(0~15V)
C.滑动变阻器(0~50Ω)
D.滑动变阻器(0~500Ω)
实验中电压表应选用A;滑动变阻器应选用C(选填相应器材前的字母).
(3)某位同学记录的6组数据如表所示,其中5组数据的对应点已经标在图b的坐标纸上,请标出余下一组数据的对应点,并画出U-I图线(在答题纸上描点、作图).
| 组别 | 1 | 2 | 3 | 4 | 5 | 6 |
| I/A | 0.12 | 0.20 | 0.31 | 0.32 | 0.49 | 0.57 |
| U/V | 1.37 | 1.32 | 1.24 | 1.18 | 1.11 | 1.05 |
(5)现有一个电动势为2.0V,内电阻为0.8Ω的蓄电池.若将该蓄电池与另一滑动变阻器(0~20Ω)串联组成闭合电路,当滑动变阻器接入电路的阻值为某一合适的值时,电源的输出功率最大,则电源的最大输出功率是Pm=1.25W.
7.2016年5月2日,比利时列日大学天文学家吉隆所领导的团队向全球媒体发布--他们在距离地球39光年的水瓶座星系中发现名为TRAPPIST1的“超冷矮恒星”,其周围有3颗“类似地球尺寸”行星环绕.他们距离TRAPPIST1不算太近,也不算太远,所接收的辐射量差不多是地球从太阳接收辐射量的2倍到4倍,用更容易理解的话说,这3颗行星都有可能有适当的温度与液态水存在,都有可能适宜生命居住,其中距离较近的两颗行星公转一周相当于地球的1.5天和2.4天.若将公转周期为1.5天的行星标记为行星A;公转周期为2.4天的行星标记为行星B,且认为它们均绕TRAPPIST1恒星做匀速圆周运动,则( )
| A. | 行星A距TRAPPIST1恒星较远 | B. | 行星A的角速度较小 | ||
| C. | 行星A的线速度较大 | D. | 行星A的向心加速度较小 |
6.作用在同一个物体的两个共点力,一个大小为3N,另一个大小为6N,它们的合力大小可能为( )
| A. | 2N | B. | 5N | C. | 9N | D. | 12N |
5.下列物理量中,属于矢量的是( )
| A. | 路程 | B. | 质量 | C. | 速度 | D. | 温度 |
4.下列关于运动和力的叙述中,正确的是( )
| A. | 做曲线运动的物体,其加速度方向可能不变 | |
| B. | 物体做圆周运动,所受的合力一定指向圆心 | |
| C. | 物体所受合力方向与运动方向相反,该物体一定做直线运动 | |
| D. | 物体运动的速率在增加,所受合力方向一定与运动方向相同 |
3. 如图所示,质量为M、倾角为θ的斜劈在水平面上以一定的初速度向右滑动的过程中,质量为m的光滑小球在斜面上恰好保持与斜劈相对静止,已知斜劈与地面的动摩擦因数是μ,则下列说法正确的是( )
如图所示,质量为M、倾角为θ的斜劈在水平面上以一定的初速度向右滑动的过程中,质量为m的光滑小球在斜面上恰好保持与斜劈相对静止,已知斜劈与地面的动摩擦因数是μ,则下列说法正确的是( )
如图所示,质量为M、倾角为θ的斜劈在水平面上以一定的初速度向右滑动的过程中,质量为m的光滑小球在斜面上恰好保持与斜劈相对静止,已知斜劈与地面的动摩擦因数是μ,则下列说法正确的是( )| A. | 小球与斜面间的压力是mgcosθ | |
| B. | 小球与斜面的加速度大小是gtanθ | |
| C. | 地面对斜劈的支持力一定大于(M+m)g | |
| D. | 地面与斜劈间的动摩擦因数是μ=1+cosθsinθ |
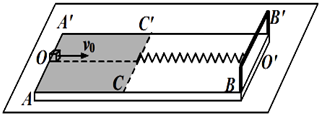 如图所示,厚度均匀、上表面为长方形的平板ABB′A′静止在光滑水平面上,平板上OO′所在直线与AB平行,CC′所在直线与OO′垂直,平板上表面的AA′至CC′段是粗糙的,CC′至BB′段是光滑的.将一轻弹簧沿OO′方向放置在平板上,其右端固定在平板BB′端的挡板上,弹簧处于原长时其左端位于CC′线上.
如图所示,厚度均匀、上表面为长方形的平板ABB′A′静止在光滑水平面上,平板上OO′所在直线与AB平行,CC′所在直线与OO′垂直,平板上表面的AA′至CC′段是粗糙的,CC′至BB′段是光滑的.将一轻弹簧沿OO′方向放置在平板上,其右端固定在平板BB′端的挡板上,弹簧处于原长时其左端位于CC′线上.
19.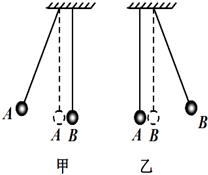 A、B两个完全相同的小钢球用轻绳悬挂在水平支架上,两根轻绳相互平行,两个钢球靠在一起,且球心等高.如图甲所示,当把小球A向左拉起一定高度,然后由静止释放,在极短时间内经过相互碰撞,可观察到小球B向右摆起,且达到的最大高度与球A释放的高度相同,如图乙所示.在小球A释放后的过程中,下列说法中正确的是( )
A、B两个完全相同的小钢球用轻绳悬挂在水平支架上,两根轻绳相互平行,两个钢球靠在一起,且球心等高.如图甲所示,当把小球A向左拉起一定高度,然后由静止释放,在极短时间内经过相互碰撞,可观察到小球B向右摆起,且达到的最大高度与球A释放的高度相同,如图乙所示.在小球A释放后的过程中,下列说法中正确的是( )
0 131620 131628 131634 131638 131644 131646 131650 131656 131658 131664 131670 131674 131676 131680 131686 131688 131694 131698 131700 131704 131706 131710 131712 131714 131715 131716 131718 131719 131720 131722 131724 131728 131730 131734 131736 131740 131746 131748 131754 131758 131760 131764 131770 131776 131778 131784 131788 131790 131796 131800 131806 131814 176998
A、B两个完全相同的小钢球用轻绳悬挂在水平支架上,两根轻绳相互平行,两个钢球靠在一起,且球心等高.如图甲所示,当把小球A向左拉起一定高度,然后由静止释放,在极短时间内经过相互碰撞,可观察到小球B向右摆起,且达到的最大高度与球A释放的高度相同,如图乙所示.在小球A释放后的过程中,下列说法中正确的是( )| A. | 机械能守恒,动量守恒 | B. | 机械能守恒,动量不守恒 | ||
| C. | 机械能不守恒,动量守恒 | D. | 机械能不守恒,动量不守恒 |