
20.在探究“物体动能的大小与哪些因素有关”的活动中:
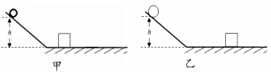
(1)如图所示,两小球(m 甲<m 乙)同时从相同斜面上相同高度由静止开始下滑,两小球同时(填“甲先”、“乙先”或“同时”)到达粗糙的水平木板表面.该实验是通过比较木块在木板上滑行的距离来比较小球动能大小的,图中不合理的地方是.该实验探究的是小球(小球/木块)的动能大小与其的关系.改正后,发现木块会从木板右侧滑出,则可以通过增大(填“增大”或“减小”)木块的质量来加以改进.
(2)为了探究动能的大小与另一个因素的关系,应该选用质量相同的小球从斜面的不同高度由静止释放,可以得到实验结论:在质量相同时,速度越大,动能越大.
(3)同学们在网上搜集了一些数据如表格所示,可以看出在质量和速度这两个物理量中,对动能影响较大的是速度(填“质量”或“速度”).
(1)如图所示,两小球(m 甲<m 乙)同时从相同斜面上相同高度由静止开始下滑,两小球同时(填“甲先”、“乙先”或“同时”)到达粗糙的水平木板表面.该实验是通过比较木块在木板上滑行的距离来比较小球动能大小的,图中不合理的地方是.该实验探究的是小球(小球/木块)的动能大小与其的关系.改正后,发现木块会从木板右侧滑出,则可以通过增大(填“增大”或“减小”)木块的质量来加以改进.
(2)为了探究动能的大小与另一个因素的关系,应该选用质量相同的小球从斜面的不同高度由静止释放,可以得到实验结论:在质量相同时,速度越大,动能越大.
(3)同学们在网上搜集了一些数据如表格所示,可以看出在质量和速度这两个物理量中,对动能影响较大的是速度(填“质量”或“速度”).
| 运动的物体 | 动能 |
| 行走的牛 | 约60J |
| 跑百米的运动员 | 约3×103J |
| 飞行的步枪子弹 | 约5×103J |
19. 在用滑轮组提升重物的实验中,若要“测该滑轮组机械效率”:
在用滑轮组提升重物的实验中,若要“测该滑轮组机械效率”:
(1)实验中,在测量绳端所受的拉力时,弹簧测力计应匀速上升(填“保持静止”或“匀速上升”).
(2)实验中测得数据为上表,请完成表格中空格内容.
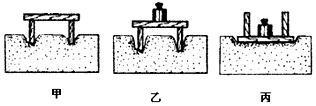
(3)上述实验数据是用右图中乙装置测的(填“甲”或“乙”),并画出其绕绳的情况.
(4)该实验中,若在原装置基础上,想改变拉力的方向,可以采取的方法是只连接一个动滑轮的方法;不考虑绳重及摩擦,改装后的机械效率将不变(填“增大”、“减小”或“不变”).
在用滑轮组提升重物的实验中,若要“测该滑轮组机械效率”:(1)实验中,在测量绳端所受的拉力时,弹簧测力计应匀速上升(填“保持静止”或“匀速上升”).
| 钩码重(N) | 拉力F (N) | 钩码移动距离(m) | 绳末端移动距离(m) | 有用功(J) | 总功(J) | 机械效率 |
| 0.96 | 0.32 | 0.10 | 0.40 |
(3)上述实验数据是用右图中乙装置测的(填“甲”或“乙”),并画出其绕绳的情况.
(4)该实验中,若在原装置基础上,想改变拉力的方向,可以采取的方法是只连接一个动滑轮的方法;不考虑绳重及摩擦,改装后的机械效率将不变(填“增大”、“减小”或“不变”).
18.(1)小明在书上看到古希腊科学家有这样一句流传很久的名言:
“给我一个支点,我就能撬起整个地球!”这句话便是说杠杆原理,杠杆原理的表达式是F1L1=F2L2,引起小明的兴趣,设计实验探究“杠杆的平衡条件”:
(2)实验没有挂钩码时,若杠杆左端下倾,则应将右端的平衡螺母向右(填“左”或“右”)调节,使杠杆在水平位置平衡.
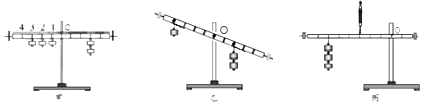
(3)实验中,用如图甲所示的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师却提醒小明不要采用这种方式,这主要是因为此种方式D
A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
(4)甲图中,不改变支点O右侧所挂的两个钩码及其位置,保持左侧第2格的钩码不动,将左侧另外两个钩码改挂到它的下方,杠杆仍可以水平平衡.实验中,保持杠杆在水平位置平衡的目的是便于测量力臂.
(5)于是小明又做了几组数据,记录在表格中,便得出了杠杆的平衡条件.
他这样得出的结论是否合理?不合理;为什么?没有改变动力臂和阻力臂的大小.
(6)杠杆在水平位置平衡后,用手使杠杆缓慢地转过一个角度(如图乙)后松手,杠杆能(选填“能”或“不能”)保持静止.
(7)实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图丙所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于平衡状态时,测出的拉力大小都与杠杆平衡条件不相符.其原因是:杠杆自重的影响.
“给我一个支点,我就能撬起整个地球!”这句话便是说杠杆原理,杠杆原理的表达式是F1L1=F2L2,引起小明的兴趣,设计实验探究“杠杆的平衡条件”:
(2)实验没有挂钩码时,若杠杆左端下倾,则应将右端的平衡螺母向右(填“左”或“右”)调节,使杠杆在水平位置平衡.
(3)实验中,用如图甲所示的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师却提醒小明不要采用这种方式,这主要是因为此种方式D
A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
(4)甲图中,不改变支点O右侧所挂的两个钩码及其位置,保持左侧第2格的钩码不动,将左侧另外两个钩码改挂到它的下方,杠杆仍可以水平平衡.实验中,保持杠杆在水平位置平衡的目的是便于测量力臂.
(5)于是小明又做了几组数据,记录在表格中,便得出了杠杆的平衡条件.
| 实验次数 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 2 | 3 | 1 | 6 |
| 2 | 4 | 3 | 2 | 6 |
| 3 | 6 | 3 | 3 | 6 |
(6)杠杆在水平位置平衡后,用手使杠杆缓慢地转过一个角度(如图乙)后松手,杠杆能(选填“能”或“不能”)保持静止.
(7)实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图丙所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于平衡状态时,测出的拉力大小都与杠杆平衡条件不相符.其原因是:杠杆自重的影响.
 生活中有很多与能量相关的现象:
生活中有很多与能量相关的现象:
16.一个重为G的物体分别沿如图所示的左右两个斜面,被推上同一个平台,如果沿两个斜面推动物体时所受摩擦力一样大,那么两个斜面相比( )
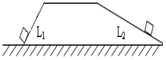
| A. | 两次所用拉力一样大,左斜面机械效率高 | |
| B. | 左斜面所用拉力较大,机械效率比右高 | |
| C. | 两个斜面做的有用功一样,效率也一样 | |
| D. | 条件不足,无法判断 |
15. 如图所示,2016年9月15日,中国在酒泉卫星发射中心用长征二号F运载火箭将天宫二号空间实验室发射升空,这是我国第一个真正意义上的空间实验室,中国航天从此步入了空间站时代!点火后,火箭载着“天宫二号”加速上升的过程中,“天宫二号”的( )
如图所示,2016年9月15日,中国在酒泉卫星发射中心用长征二号F运载火箭将天宫二号空间实验室发射升空,这是我国第一个真正意义上的空间实验室,中国航天从此步入了空间站时代!点火后,火箭载着“天宫二号”加速上升的过程中,“天宫二号”的( )
0 175991 175999 176005 176009 176015 176017 176021 176027 176029 176035 176041 176045 176047 176051 176057 176059 176065 176069 176071 176075 176077 176081 176083 176085 176086 176087 176089 176090 176091 176093 176095 176099 176101 176105 176107 176111 176117 176119 176125 176129 176131 176135 176141 176147 176149 176155 176159 176161 176167 176171 176177 176185 235360
如图所示,2016年9月15日,中国在酒泉卫星发射中心用长征二号F运载火箭将天宫二号空间实验室发射升空,这是我国第一个真正意义上的空间实验室,中国航天从此步入了空间站时代!点火后,火箭载着“天宫二号”加速上升的过程中,“天宫二号”的( )| A. | 动能增大,势能增大 | B. | 动能减小,势能不变 | ||
| C. | 动能减小,势能增大 | D. | 动能不变,势能增大 |