18.工人利用如图甲所示的滑轮组从一口枯井中提起质量为6kg的物体,他用图乙所示随时间变化的水平向右的拉力F拉绳,重物的速度v随时间t变化的关系图象如图丙所示,不计绳重和摩擦(g取10N/kg).以下说法正确的是( )
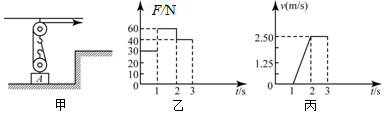
| A. | 在0-1s内,拉力F做的功为75J | B. | 动滑轮的重力30N | ||
| C. | 在2-3s内,滑轮组的机械效率62.5% | D. | 在2-3s内,拉力F做功的功率为200W |
17.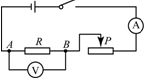 在探究“电压一定时,电流与电阻关系”的实验中,电路如图所示,先在AB间接入10Ω的定值电阻R,移动滑片P,使电压表示数为3V,读出电流表示数.接着取下10Ω的电阻换上15Ω定值电阻,不进行其他操作就闭合开关.此时电压表示数及应进行的操作是( )
在探究“电压一定时,电流与电阻关系”的实验中,电路如图所示,先在AB间接入10Ω的定值电阻R,移动滑片P,使电压表示数为3V,读出电流表示数.接着取下10Ω的电阻换上15Ω定值电阻,不进行其他操作就闭合开关.此时电压表示数及应进行的操作是( )
在探究“电压一定时,电流与电阻关系”的实验中,电路如图所示,先在AB间接入10Ω的定值电阻R,移动滑片P,使电压表示数为3V,读出电流表示数.接着取下10Ω的电阻换上15Ω定值电阻,不进行其他操作就闭合开关.此时电压表示数及应进行的操作是( )| A. | 大于3V,应将滑片P向左滑 | B. | 大于3V,应将滑片P向右滑 | ||
| C. | 小于3V,应将滑片P向左滑 | D. | 小于3V,应将滑片P向右滑 |
16.以下不是做功改变物体内能的是( )
| A. |  | B. |  | C. |  | D. |  |
15.下列关于电学知识说法正确的是( )
| A. | 学校里的路灯能同时亮同时熄灭,因为它们是串联连接的 | |
| B. | 电路中常用铜做导线而不用铁,是因为铜的电阻小 | |
| C. | 导体中的电流越大,导体的电阻越小;电流为零时,电阻为零 | |
| D. | 教室里的吊扇调速器与吊扇之间的是串联的 |
14. 在如图所示的“汽油机模型”实验中,将适量的汽油喷入厚壁有机玻璃圆筒内,用软木塞塞住筒口,筒内底转有两根与静电电机(电源)相连接的放电针,当方电针释放电火花时,以下说法正确的是( )
在如图所示的“汽油机模型”实验中,将适量的汽油喷入厚壁有机玻璃圆筒内,用软木塞塞住筒口,筒内底转有两根与静电电机(电源)相连接的放电针,当方电针释放电火花时,以下说法正确的是( )
在如图所示的“汽油机模型”实验中,将适量的汽油喷入厚壁有机玻璃圆筒内,用软木塞塞住筒口,筒内底转有两根与静电电机(电源)相连接的放电针,当方电针释放电火花时,以下说法正确的是( )| A. | 电火花放电使汽油燃烧的过程,将电能转化为汽油的化学能 | |
| B. | 燃气将软木塞冲出的过程,燃气的内能转化为软木塞的机械能,燃气的内能不变 | |
| C. | 此装置可模拟四冲程汽油工作时的做功冲程 | |
| D. | 汽油的热值随其质量的变小而变小 |
13. 10月1日清晨,来自全国各地的各族群众在北京天安门广场观看升旗仪式,庆祝中华人民共和国成立67周年.在国歌奏响的90s内,旗手将质量6kg的国旗匀速提升30m(g=10N/kg),以下说法错误的是( )
10月1日清晨,来自全国各地的各族群众在北京天安门广场观看升旗仪式,庆祝中华人民共和国成立67周年.在国歌奏响的90s内,旗手将质量6kg的国旗匀速提升30m(g=10N/kg),以下说法错误的是( )
10月1日清晨,来自全国各地的各族群众在北京天安门广场观看升旗仪式,庆祝中华人民共和国成立67周年.在国歌奏响的90s内,旗手将质量6kg的国旗匀速提升30m(g=10N/kg),以下说法错误的是( )| A. | 旗杆顶部装有一个定滑轮,目的是为了改变力的方向 | |
| B. | 做的有用功是180J | |
| C. | 有用功的功率为20W | |
| D. | 国旗在匀速上升的过程中,它的机械能变大 |
12. 2016里约奥运会中国女排夺冠,站上世界之巅.在排球运动中,跳发球是最具威力的发球方式,其动作要领可简化为“抛球、腾空、击球和落地”四个过程,一下说法正确的是(忽略空气阻力)( )
2016里约奥运会中国女排夺冠,站上世界之巅.在排球运动中,跳发球是最具威力的发球方式,其动作要领可简化为“抛球、腾空、击球和落地”四个过程,一下说法正确的是(忽略空气阻力)( )
2016里约奥运会中国女排夺冠,站上世界之巅.在排球运动中,跳发球是最具威力的发球方式,其动作要领可简化为“抛球、腾空、击球和落地”四个过程,一下说法正确的是(忽略空气阻力)( )| A. | 排球被抛出上升过程中,动能变大,重力势能变大,机械能变大 | |
| B. | 排球落地时,重力没有做功 | |
| C. | 运动员击球时对排球做了功 | |
| D. | 排球落地后弹起过程中,弹性势能直接转化为重力势能 |
11.在生产生活中,利用如图所示单机械时,一定费力的是( )
| A. |  自行车手闸 | B. |  食品夹 | C. |  天平 | D. |  滑轮组 |
9.小明用如图所示的实验装置探究杠杆的平衡条件.
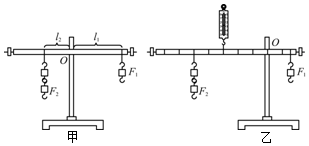
(1)为了方便测量力臂大小,应将杠杆调至水平位置平衡.调节时若杠杆右端稍低,可只将右端的平衡螺母向左端调节.
(2)小明调节杠杆平衡后,通过加挂钩码分别改变F1和F2并测出对应的力臂I1和I2.记录了如表中所不的实验数据.小明得出杠杆的平衡条件是:“动力×动力作用点到支点的距离=阻力×阻力作用点到支点的距离”.小红认为小明白结论不正确,为了验证自己的观点,小红将图中的F1改用弹簧测力计来拉,实验时改变拉力的方向,仍使杠杆在水平位置平衡,比较拉力的大小,即可证明小红的判断是否正确.
(3)小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图乙装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于平衡状态时,测出的拉力大小都与杠杆平衡条件不相符.其原因是:杠杆自重的影响.
0 174444 174452 174458 174462 174468 174470 174474 174480 174482 174488 174494 174498 174500 174504 174510 174512 174518 174522 174524 174528 174530 174534 174536 174538 174539 174540 174542 174543 174544 174546 174548 174552 174554 174558 174560 174564 174570 174572 174578 174582 174584 174588 174594 174600 174602 174608 174612 174614 174620 174624 174630 174638 235360
| 次数 | F1N | h/cm | F2N | h/cm |
| 1 | 1 | 8 | 2 | 4 |
| 2 | 2 | 8 | 1 | 16 |
| 3 | 2 | 12 | 3 | 8 |
(1)为了方便测量力臂大小,应将杠杆调至水平位置平衡.调节时若杠杆右端稍低,可只将右端的平衡螺母向左端调节.
(2)小明调节杠杆平衡后,通过加挂钩码分别改变F1和F2并测出对应的力臂I1和I2.记录了如表中所不的实验数据.小明得出杠杆的平衡条件是:“动力×动力作用点到支点的距离=阻力×阻力作用点到支点的距离”.小红认为小明白结论不正确,为了验证自己的观点,小红将图中的F1改用弹簧测力计来拉,实验时改变拉力的方向,仍使杠杆在水平位置平衡,比较拉力的大小,即可证明小红的判断是否正确.
(3)小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图乙装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于平衡状态时,测出的拉力大小都与杠杆平衡条件不相符.其原因是:杠杆自重的影响.