题目内容
4.甲、乙两车同时从A、B两地沿同一直线向东运动,它们的s-t图象分别如图(a)和(b)所示.若经过6秒钟两车相遇,则A、B两地间的距离为( )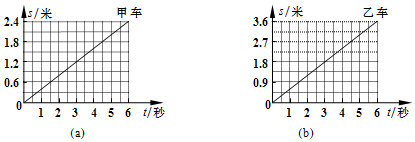
| A. | 1.2米 | B. | 2.4米 | C. | 3.6米 | D. | 6米 |
分析 知道甲乙的路程和时间,求出速度;由甲乙两车的速度计算出分别通过的路程,求出A、B两地的距离.
解答 解:
甲车的速度:v甲=$\frac{{s}_{甲}}{{t}_{甲}}$=$\frac{2.4m}{6s}$=0.4m/s,
乙车的速度:v乙=$\frac{{s}_{乙}}{{t}_{乙}}$=$\frac{3.6m}{6s}$=0.6m/s;
由于甲、乙两车分别从A、B两地同时同向运动,经过6s甲、乙相遇,
根据v=$\frac{s}{t}$可得,甲通过的路程:
s甲′=v甲t=0.4m/s×6s=2.4m;
乙通过的路程:s乙′=v乙t=0.6m/s×6s=3.6m;
两地距离:s=s甲-s乙=3.6m-2.4m=1.2m.
故选A.
点评 此题主要考查的是学生对速度计算公式的理解和掌握,读懂图象是解决此题的关键.

练习册系列答案
 天天向上一本好卷系列答案
天天向上一本好卷系列答案 小学生10分钟应用题系列答案
小学生10分钟应用题系列答案
相关题目
 阅读短文,回答文后的问题.
阅读短文,回答文后的问题.
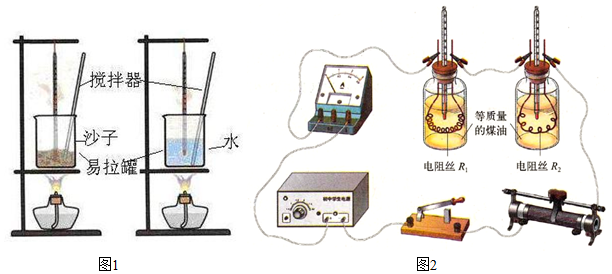
19.为了比较不同物质的吸热本领是否相同,小明选取了如图1所示器材进行实验,实验数据记录如表:
(1)为完成该实验,除图中使用的器材外,还需要的测量工具有温度计、秒表和天平.
(2)分析表中的实验数据可知:质量相等的水和沙子,升高相同温度时,水吸收的热量大于(选填“大于”、“小于”或“等于”)沙子吸收的热量.这说明水的吸热本领大些.
(3)小华看了小明的实验方案和器材后,建议小明把沙子换成食用油,你能说出这样做的优点吗?食用油较沙子受热均匀
(4)如图2,是课本《16.4 科学探究:电流的热效应》一节中所提供的实验方案,其实这一方案经过适当的改动,完全可以用来完成本实验的探究,请你指出其中需要改动的地方:
改动一:将一个容器中的煤油换成等质量的食用油
改动二:容器内换成两根阻值大小相等的电阻丝
| 物质 | 质量/g | 升温10℃所需时间/s | 升温20℃所需时间/s | 升温30℃所需时间/s |
| 沙子 | 30 | 64 | 89 | 124 |
| 水 | 30 | 96 | 163 | 220 |
(2)分析表中的实验数据可知:质量相等的水和沙子,升高相同温度时,水吸收的热量大于(选填“大于”、“小于”或“等于”)沙子吸收的热量.这说明水的吸热本领大些.
(3)小华看了小明的实验方案和器材后,建议小明把沙子换成食用油,你能说出这样做的优点吗?食用油较沙子受热均匀
(4)如图2,是课本《16.4 科学探究:电流的热效应》一节中所提供的实验方案,其实这一方案经过适当的改动,完全可以用来完成本实验的探究,请你指出其中需要改动的地方:
改动一:将一个容器中的煤油换成等质量的食用油
改动二:容器内换成两根阻值大小相等的电阻丝
 工人用如图所示的滑轮装置,把重为100牛的物体匀速向上提起,在10秒内绳子自由端上升了6米.不计绳子和滑轮之间的摩擦及滑轮重,求:
工人用如图所示的滑轮装置,把重为100牛的物体匀速向上提起,在10秒内绳子自由端上升了6米.不计绳子和滑轮之间的摩擦及滑轮重,求: