题目内容
15. 阅读短文,回答文后的问题.
阅读短文,回答文后的问题.扫地机器人是一种能对地面进行自动清扫、吸尘、抹拖的智能家用电器.因为其内部的微电脑能对房间大小、家俱摆放、地面清洁度等因素进行检测,并依靠内置的程序,制定合理的清洁路线,具备一定的智能,所以被人称之为机器人.机器人在工作时,采用仿生技术,类似蝙蝠、海豚捕食的原理来侦测判断家居物品及空间方位,灵活的躲避家居物品,甚至可以判断台阶楼梯,及时规避,灵敏度较高.
电动机是机器人的心脏,每分钟旋转2万转~4万转,远高于电扇的1800转.电动机除了推动重达2.8kg的机器人前进,边刷边滚动外,还通过高速旋转,在主机内形成“真空”,利用由此产生的高速气流,将垃圾吸入尘盒.
充电座顶部凸起部位是360度红外发射窗,与机器人顶部探测器对应.这样机器人在工作完成后,就可以“自己回家充电”了.甚至有些机器人安装好摄像头,利用wifi与主人APP相连,就可以在帮主人打扫卫生的同时,也成为了家庭监控卫士.
(1)机器人探测家具利用的是B
A.紫外线 B.超声波 C.次声波 D.可见光
(2)机器人吸尘的原理是流体流速大的地方压强小;
(3)如果机器人的车轮和抹布与地面的接触面积是200cm2,则它对地面的压强是1.4×103Pa;
(4)机器人利用wifi与主人手机联络的过程,说法正确的是D
A.使用红外线传输数字信号B.使用超声波传输数字信号
C.使用光纤传输数字信号D.使用电磁波传输数字信号.
分析 (1)蝙蝠、海豚捕食利用的是超声波;
(2)流体压强与流速的关系:流速越大的位置压强越小;
(3)先根据F=G=mg求出压力,然后根据p=$\frac{F}{S}$求出地面受到的压强.
(4)机器人利用wifi与主人手机联络的过程是利用电磁波的传播;
解答 解:(1)根据题意可知,机器人在工作时,采用仿生技术,类似蝙蝠、海豚捕食的原理来侦测判断家居物品及空间方位,利用的是超声波,故应选B;
(2)机器人吸尘是利用高速旋转的叶轮把空气排出风机,同时使外部空气和灰尘不断地补充进风机,吸尘器就能“吸尘”了,其原理利用了流体流速大的地方压强小;
(3)机器人吸尘器静止在水平地面上时,地面受到的压力:
F=G=mg=2.8kg×10N/kg=28N,
地面受到的压强:
p=$\frac{F}{S}$=$\frac{28N}{2×1{0}^{-2}{m}^{2}}$=1.4×103Pa.
(4)机器人利用wifi与主人手机联络的过程是利用电磁波的传播,故应选D.
故答案为:(1)B;(2)流体流速大的地方压强小;(3)1.4×103Pa;(4)D.
点评 本题考查超声波的应用、电磁波的传播、流体压强与流速的关系以及压强计算公式的应用,是一道声学、力学综合题.

练习册系列答案
 天天向上一本好卷系列答案
天天向上一本好卷系列答案 小学生10分钟应用题系列答案
小学生10分钟应用题系列答案
相关题目



 如图所示,是一种运动自行车的计数系统,它主要由一块安装于车把上的“码表”、一个安装在车轮支架上的“感应器”、一个安装在车轮辐条上的“小磁铁”组成.骑行时,车轮辐条上小磁铁随车轮转动,每经过感应器一次,感应
如图所示,是一种运动自行车的计数系统,它主要由一块安装于车把上的“码表”、一个安装在车轮支架上的“感应器”、一个安装在车轮辐条上的“小磁铁”组成.骑行时,车轮辐条上小磁铁随车轮转动,每经过感应器一次,感应



 如果想在如图所示的电路中再接入一只灯泡,且与其它两灯互不干扰,则应安装在位置2(选填“1”、“2”或“3”);要想直接测出通过灯泡L1的电流,则应在位置3(选填“1”、“2”或“3”)接入一支电流表.
如果想在如图所示的电路中再接入一只灯泡,且与其它两灯互不干扰,则应安装在位置2(选填“1”、“2”或“3”);要想直接测出通过灯泡L1的电流,则应在位置3(选填“1”、“2”或“3”)接入一支电流表.
4.甲、乙两车同时从A、B两地沿同一直线向东运动,它们的s-t图象分别如图(a)和(b)所示.若经过6秒钟两车相遇,则A、B两地间的距离为( )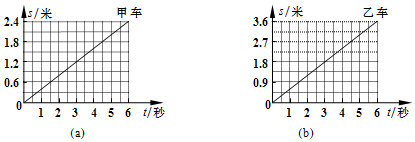
| A. | 1.2米 | B. | 2.4米 | C. | 3.6米 | D. | 6米 |
5.在图所示的电路中,电源电压保持不变.当电键S从闭合到断开时,电路中( )

| A. | 电流表的示数变小,电压表的示数变大 | |
| B. | 电流表的示数变大,电压表的示数变大 | |
| C. | 电流表的示数变大,电压表的示数变小 | |
| D. | 电流表的示数不变,电压表的示数变大 |