题目内容
11.如图,在探究“杠杆的平衡条件”的实验中:
(1)实验前,杠杆在图(a)所示位置静止,杠杆处于平衡 (选填“平衡”或“不平衡”)状态,此时应先将左边的平衡螺母向左 调节,使杠杆在水平 位置保持平衡,目的是为了便于测量力臂.
(2)操作时,把钩码分别挂在杠杆的两侧,若不计杠杆质量和摩擦且杠杆刻度均匀,每个钩码均重1牛,如图(b)在A点挂两个钩码时,为了使杠杆恢复平衡,可以在C点挂4 个钩码.
(3)甲同学在实验中得出三组数据(如表).试根据它的实验结果归纳出杠杆的平衡条件是F1L1=F2L2 .
| 实验次数 | 动力F1(牛) | 动力臂l1(厘米) | 阻力F2(牛) | 阻力臂l2(厘米) |
| 1 | 2 | 5 | 1 | 10 |
| 2 | 4 | 10 | 8 | 5 |
| 3 | 3 | 6 | 2 | 9 |
| 动力F1(牛) | 动力臂l1(厘米) | 阻力F2(牛) | 阻力臂l2(厘米) |
| 3 | 4 | 4 | 3 |
分析 (1)杠杆处于静止状态和匀速转动状态都称为杠杆平衡,为了使杠杆在水平位置平衡,平衡螺母向上翘的一端移动;探究杠杆平衡条件时,使杠杆在水平位置平衡,力臂在杠杆上,便于测量力臂;
(2)根据阻力是阻碍杠杆转动的力,动力是使杠杆转动的力,确定B点和C点施加力的方向.根据杠杆平衡条件求出B、C点挂钩码数量;
(3)杠杆平衡条件:动力×动力臂=阻力×阻力臂(F1L1=F2L2).
(4)实验时,如果只用一组数据得到结论,偶然性太大,因此应获取多组实验数据归纳出物理规律.
解答 解:(1)杠杆停在如图甲所示的位置,保持静止状态,杠杆处于平衡状态;要使杠杆在水平位置处于平衡状态,平衡螺母向上翘的左端移动;
杠杆在水平位置平衡,力臂在杠杆上,便于直接从杠杆上测量力臂;
(2)操作时,把钩码分别挂在杠杆的两侧,改变钩码的个数或在杠杆上的力臂的大小,使杠杆平衡.
设杠杆的一个小格是l,设右端挂钩码重为F,根据杠杆平衡条件得,2N×4l=F×2l,所以F=4N,所以在C处挂4个钩码.
(3)根据表格中的数据可归纳出杠杆平衡条件:动力×动力臂=阻力×阻力臂,即F1L1=F2L2.
(4)该组的同学只用一组数据得到结论,偶然性太大,因此应获取多组实验数据归纳出物理规律.力和力臂是两个不同的物理量,单位不同,不能相加.
故答案为:(1)平衡;左;水平;便于测量力臂; (2)4;(3)F1L1=F2L2;(4)一次实验具有偶然性.
点评 杠杆无论在水平位置静止还是在倾斜位置静止,杠杆只有是静止,杠杆就处于平衡状态,此处学生容易忽视;杠杆平衡条件是杠杆平衡问题的重要依据,一个题目中可能多次用到杠杆平衡条件,一定要熟练掌握

练习册系列答案
相关题目
1.一根没有绝缘皮的铜线电阻为R,要使这根接入电路的导线电阻变小,可采用的方法是( )
| A. | 增大导线两端的电压 | B. | 增大导线中的电流 | ||
| C. | 将导线对折后接入电路 | D. | 将导线拉长后接入电路 |
6.为研究电流通过导体产生的热量与哪些因素有关,有同学找来了两根不同阻值的电阻丝,多块相同的泡沫块以及滑动变阻器、开关、导线、电源等,设计的方案如甲图所示.
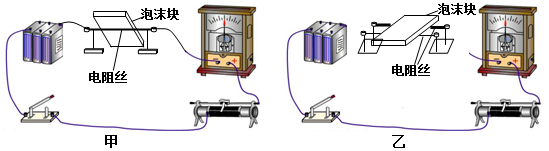
(1)实验时,接通电路过几秒钟后发现泡沫块被电阻丝“切断”.该实验方案是通过测量泡沫块被切断的时间长短来比较电流通过电阻丝时产生的热量多少的.
(2)为研究电流通过导体产生热量的多少与电流大小的关系,实验该怎么操作?应该利用甲图,电阻值和通电时间相同,利用滑动变阻器先后改变通过电阻丝的电流,分别测量两泡沫块被切断的时间.
(3)在电流与通电时间相同条件下,选用长度和横截面积都相同的两种材料进行实验,为了使实验现象最明显,可以选用表中的铜与镍铬合金进行对比. (20℃时长1米、横截面积1毫米2的几种材料的电阻)
(4)为研究电流通过导体产生热量的多少与电阻大小的关系,请你在乙图中画上连接导线.如图.
(1)实验时,接通电路过几秒钟后发现泡沫块被电阻丝“切断”.该实验方案是通过测量泡沫块被切断的时间长短来比较电流通过电阻丝时产生的热量多少的.
(2)为研究电流通过导体产生热量的多少与电流大小的关系,实验该怎么操作?应该利用甲图,电阻值和通电时间相同,利用滑动变阻器先后改变通过电阻丝的电流,分别测量两泡沫块被切断的时间.
| 材料 | 铜 | 铝 | 钨 | 镍铬合金 |
| 电阻(欧) | 0.0175 | 0.029 | 0.053 | 1.0 |
(4)为研究电流通过导体产生热量的多少与电阻大小的关系,请你在乙图中画上连接导线.如图.
 如图所示,已知氢原子只有一个质子,一个电子,虚线表示氢原子核外电子的运动轨道.请在此图上完成氢原子的核式结构模型示意图,要求:用“+”、“-”分别表示原子核、电子,并标出原子核、电子的大致位置.
如图所示,已知氢原子只有一个质子,一个电子,虚线表示氢原子核外电子的运动轨道.请在此图上完成氢原子的核式结构模型示意图,要求:用“+”、“-”分别表示原子核、电子,并标出原子核、电子的大致位置. 如图所示,侧壁开有四个小孔的玻璃管中装有足量的水,同时打开小孔,则水从小孔a、b、c、d中喷出最远的是( )
如图所示,侧壁开有四个小孔的玻璃管中装有足量的水,同时打开小孔,则水从小孔a、b、c、d中喷出最远的是( )