题目内容
19.为使杠杆水平位置平衡,请在图中A点画出最小的动力F1,及阻力对应的力臂l2.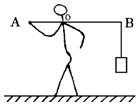
分析 (1)力臂的概念:力臂是指从支点到力的作用线的距离;
(2)杠杆平衡条件:动力×动力臂=阻力×阻力臂(F1l1=F2l2),在阻力跟阻力臂的乘积一定时,动力臂越长,动力越小.
解答 解:根据杠杆平衡的条件可知,力臂越长越省力,在A点画出最小的动力F1,而OA的力臂最长,所以根据力臂的画法,过A点做OA的垂线即可;
物体的重力为阻力F2,过O点做阻力作用线的垂线段即为阻力的力臂l2.如图所示:
点评 本题考查了力臂的作法.关键是要作出支点到力的作用线的垂线段,会准确画出力臂和作用力,注意力臂越长越省力.

练习册系列答案
 世纪百通期末金卷系列答案
世纪百通期末金卷系列答案
相关题目
9.下列措施中,属于利用电流热效应的是( )
| A. | 电视机的后盖有很多孔 | B. | 电饭锅的发热板装在底部 | ||
| C. | 与空调器相连的导线很粗 | D. | 电脑的主机中安装微型风扇 |
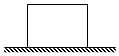 在图中,重为8牛的物体静止在水平地面上,请在图中用力的图示法画出它所受地面的支持力F.
在图中,重为8牛的物体静止在水平地面上,请在图中用力的图示法画出它所受地面的支持力F.


14. 根据“探究杠杆平衡的条件”实验要求,完成下列各题:
根据“探究杠杆平衡的条件”实验要求,完成下列各题:
(1)某同学在调节杠杆水平位置平衡时,杠杆静止时的位置如图所示.此时杠杆是(选填“是”或“不是”)处于平衡状态.
(2)在调节时,要使杠杆在水平位置平衡,其目的主要是为了便于直接在杠杆上读出力臂的值.
(3)开始实验前,某小组同学准备了砝码、弹簧夹、刻度尺、弹簧测力计、带刻度的杠杆,其中多余的器材是刻度尺和砝码,缺少的器材是钩码,铁架台..
(4)实验中使用弹簧测力计是为了研究当动力和阻力在支点两侧时,杠杆的平衡条件.
(5)某小组的同学采用两边挂钩码的方法做实验,当杠杆平衡时,测得的数据如表所示.经过对表格中数据的比较,可得到的结论是:当杠杆平衡时,动力×动力臂=阻力×阻力臂.
根据“探究杠杆平衡的条件”实验要求,完成下列各题:(1)某同学在调节杠杆水平位置平衡时,杠杆静止时的位置如图所示.此时杠杆是(选填“是”或“不是”)处于平衡状态.
(2)在调节时,要使杠杆在水平位置平衡,其目的主要是为了便于直接在杠杆上读出力臂的值.
(3)开始实验前,某小组同学准备了砝码、弹簧夹、刻度尺、弹簧测力计、带刻度的杠杆,其中多余的器材是刻度尺和砝码,缺少的器材是钩码,铁架台..
(4)实验中使用弹簧测力计是为了研究当动力和阻力在支点两侧时,杠杆的平衡条件.
(5)某小组的同学采用两边挂钩码的方法做实验,当杠杆平衡时,测得的数据如表所示.经过对表格中数据的比较,可得到的结论是:当杠杆平衡时,动力×动力臂=阻力×阻力臂.
| 实验序号 | 动力F1(牛) | 动力臂L1(厘米) | 阻力F2(牛) | 阻力臂L2(厘米) |
| 1 | 2 | 15 | 3 | 10 |
| 2 | 4 | 10 | 8 | 5 |
| 3 | 3 | 5 | 1 | 15 |
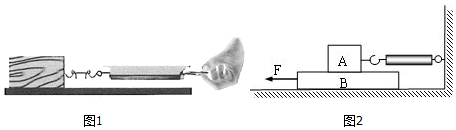
 在研究“改变物体内能的方式”时,设计的方案有:
在研究“改变物体内能的方式”时,设计的方案有:
11.如图,在探究“杠杆的平衡条件”的实验中:

(1)实验前,杠杆在图(a)所示位置静止,杠杆处于平衡 (选填“平衡”或“不平衡”)状态,此时应先将左边的平衡螺母向左 调节,使杠杆在水平 位置保持平衡,目的是为了便于测量力臂.
(2)操作时,把钩码分别挂在杠杆的两侧,若不计杠杆质量和摩擦且杠杆刻度均匀,每个钩码均重1牛,如图(b)在A点挂两个钩码时,为了使杠杆恢复平衡,可以在C点挂4 个钩码.
(3)甲同学在实验中得出三组数据(如表).试根据它的实验结果归纳出杠杆的平衡条件是F1L1=F2L2 .
(4)乙同学记录了如表数据,得出了“动力+动力臂=阻力+阻力臂”,该同学实验存在的问题是一次实验具有偶然性.
(1)实验前,杠杆在图(a)所示位置静止,杠杆处于平衡 (选填“平衡”或“不平衡”)状态,此时应先将左边的平衡螺母向左 调节,使杠杆在水平 位置保持平衡,目的是为了便于测量力臂.
(2)操作时,把钩码分别挂在杠杆的两侧,若不计杠杆质量和摩擦且杠杆刻度均匀,每个钩码均重1牛,如图(b)在A点挂两个钩码时,为了使杠杆恢复平衡,可以在C点挂4 个钩码.
(3)甲同学在实验中得出三组数据(如表).试根据它的实验结果归纳出杠杆的平衡条件是F1L1=F2L2 .
| 实验次数 | 动力F1(牛) | 动力臂l1(厘米) | 阻力F2(牛) | 阻力臂l2(厘米) |
| 1 | 2 | 5 | 1 | 10 |
| 2 | 4 | 10 | 8 | 5 |
| 3 | 3 | 6 | 2 | 9 |
| 动力F1(牛) | 动力臂l1(厘米) | 阻力F2(牛) | 阻力臂l2(厘米) |
| 3 | 4 | 4 | 3 |