题目内容
4. 老师利用如图甲所示的装置演示动能与重力势能的相互转化后,小光想:小球在摆动过程中的机械能的大小是否与细线的长度有关呢?为了探究此问题,他设计了以下实验装置:将无弹性的细线上端固定在铁架台上,下端拴住小球,使小球摆动到最低点时恰好撞击静止在水平桌面上的木块,如图乙所示.(不计细线固定端的摩擦与空气阻力)
老师利用如图甲所示的装置演示动能与重力势能的相互转化后,小光想:小球在摆动过程中的机械能的大小是否与细线的长度有关呢?为了探究此问题,他设计了以下实验装置:将无弹性的细线上端固定在铁架台上,下端拴住小球,使小球摆动到最低点时恰好撞击静止在水平桌面上的木块,如图乙所示.(不计细线固定端的摩擦与空气阻力)(1)小光将长为l的细线拉至水平状态静止时,小球具有的机械能是以重力势能的形式存在.
(2)释放小球后,木块被小球撞击并在水平桌面上滑动了一段距离s,在此过程中木块克服摩擦力做功.
(3)小光多次改变拴小球的细线长度,并调整细线固定端的位置,每次均将小球拉至细线处于水平状态时自由释放,使它摆动到相同的最低点撞击同一木块,测出木块被撞击后运动的距离,通过比较运动距离的长短来判断小球具有的机械能大小.请你分析小光的实验方案是否可行?不可行,理由是:小球到水平桌面的高度不同.
(4)小光想:细线没有弹性,如果换成长度为l′(l′<l)的橡皮筋拴住小球,并保持小球在第(1)问的水平高度静止(如图丙所示),自由释放小球后,若仍能摆动到原来的最低点撞击同一木块,那么借助橡皮筋的弹性应该能使木块运动的距离大于s.请你从能量转化的角度分析这一设想是否正确?不正确,小球的机械能有一部分转化为橡皮筋的弹性势能,导致小球的机械能减少,从而使木块运动的距离小于s.
分析 (1)小光将长为l的细线拉至水平状态静止时,小球的速度为0,弹性势能为0,有下落的高度,而机械能等于动能和势能之和;
(2)木块在水平方向匀速时,水平方向只受到摩擦力的作用,并且物体在水平方向有运动的距离;
(3)改变拴小球的细线长度时,小球小落的高度发生变化,而重力势能的大小与高度有关;
(4)换成长度为l′的橡皮筋拴住小球后,小球下落时重力势能转化为小球动能和橡皮筋的弹性势能,木块获得的机械性能减小,据此判断木块滑行距离的变化.
解答 解:(1)小光将长为l的细线拉至水平状态静止时,小球的速度为0即动能为0,绳子没有形变即弹性势能为0,有下落的高度即有重力势能,而机械能等于动能和势能之和,所以,小球具有的机械能是以重力势能的形式存在;
(2)木块被小球撞击并在水平桌面上滑动了一段距离s的过程中,水平方向只受到摩擦力的作用,故在此过程中木块克服摩擦力做功;
(3)改变拴小球的细线长度时,小球撞击同一木块后,木块运动的距离越远,克服摩擦力做的功越多,但此时小球小落的高度也会发生变化,而重力势能的大小与高度有关,即重力势能发生变化,不能探究小球在摆动过程中的机械能的大小是否与细线的长度有关;
(4)换成长度为l′的橡皮筋拴住小球后,小球下落时重力势能转化为小球动能和橡皮筋的弹性势能,小球撞击同一木块后,木块获得的机械性能减小,木块克服摩擦力做的功减少,木块运动的距离小于s,故小光的分析是错误的.
故答案为:
(1)重力势;
(2)摩擦;
(3)不可行;小球到水平桌面的高度不同;
(4)不正确,小球的机械能有一部分转化为橡皮筋的弹性势能,导致小球的机械能减少,从而使木块运动的距离小于s.
点评 本题考查了小球在摆动过程中的机械能的大小是否与细线的长度有关的实验,明确影响动能和势能的因素以及机械能的转化是关键,要注意控制变量法和转换法的应用.

 4月初小芳家中的电能表的示数为
4月初小芳家中的电能表的示数为 ,5月初电能表如图所示,4月份她家共使用了100度电.她认真观察了几分钟,查出电能表的转盘转过60圈,则这几分钟内她家的用电器消耗的电能是7.2×104J.(要过程)
,5月初电能表如图所示,4月份她家共使用了100度电.她认真观察了几分钟,查出电能表的转盘转过60圈,则这几分钟内她家的用电器消耗的电能是7.2×104J.(要过程)| A. | 一个物体能不能被看清楚,与物体在视网膜上成像的位置有关 | |
| B. | 离眼睛较远或较小的物体,可以用把它移近眼睛的办法来看清它 | |
| C. | 当物体的直径小到0.1mm以下时,为了看清它,需要使用望远镜 | |
| D. | 当物体到眼睛的距离无法缩短时,为了看清它,需要使用显微镜 |
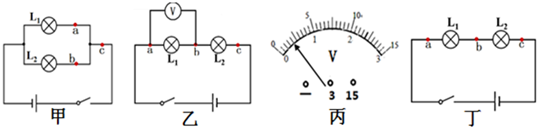
(1)小明设计了如图甲所示的电路图,并用电流表测量了a、b、c三处的电流,电流表的示数如表1
表1
| Ia/A | Ib/A | Ic/A |
| 0.18 | 0.18 | 0.36 |
| Uab/A | Ubc/A | Uac/A |
| 2.5 | 4.5 |
改进后并多次实验得到的结论是:并联电路中,干路电流等于各支路电流之和;
(2)为了探究串联电路中电压的关系,小明设计了如图乙所示的电路图,并进行实验.测量完L1两端的电压后,在测量L2两端的电压时,为了节省时间,小明将电压表的b接点不动,只断开a接点,并改接到C接点上,你认为小明用上面的方法不能(“能”或“不能”)测出L2两端的电压,原因是电压表正负接线柱接反了;
(3)图乙中,小明通过实验操作,测得ab、ac间电压表示数如表2,其中bc间电压如图丙所示,其大小是2V.小华认为小明在测量bc间电压时操作还有待改进,接下来应该断开开关,电压表换用0~3V的量程.通过多次实验分析可以得出的结论是:串联电路中总电压等于各分电压之和;
(4)小明按如图丁连接好电路,正确操作后,测得a、b、c三处的电流记为Ia、Ib、Ic,测得ab、bc、ac两点间的电压为Uab、Ubc、Uac.下列说法正确的是B
A.Ia>Ib>Ic B.Ia=Ib=Ic C.Ia<Ib<Ic D.Uab=Ubc=Uac
(5)在进行图乙实验时小明误将电流表当成电压表并联在了ab两端,闭合开关后,能发光的灯泡是“L2”选填“L1”、“L2”或“L1和L2”)并且亮度比正确操作时更亮(选填“亮”、“暗”).
 小明利用如图所示的实验装置,进行“探究光的反射规律”的实验.
小明利用如图所示的实验装置,进行“探究光的反射规律”的实验.(甲)研究串联电路的电流特点 (乙)伏安法测定值电阻的阻值
(丙)研究杠杆平衡条件 (丁)探究使用定滑轮的特点.
| A. | 甲 丙 丁 | B. | 乙 丙 | C. | 乙 丁 | D. | 甲 乙 |