题目内容
3. 如图所示,是使用铁锹时作用在铁锹上的力F1、F2.请作出图中力F1、F2的力臂L1、L2.
如图所示,是使用铁锹时作用在铁锹上的力F1、F2.请作出图中力F1、F2的力臂L1、L2.
分析 根据力臂是支点到作用线的距离,即可作出相应的动力臂.
解答 解:
由图知,O为支点,从O点作动力F1作用线的垂线,垂线段长为动力臂L1;反向延长阻力F2力的作用线,从O点做它的垂线,垂线段长为阻力臂L2,如图所示: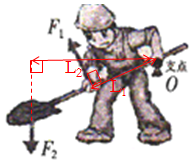 .
.
点评 此类题的关键是掌握杠杆五要素,然后根据杠杆的五要素作出相应的作用力或力臂,并且作图要求规范.

练习册系列答案
 天天向上一本好卷系列答案
天天向上一本好卷系列答案 小学生10分钟应用题系列答案
小学生10分钟应用题系列答案
相关题目
 按下列要求作图
按下列要求作图
14. 如图所示,小明在做模拟“蹦极”的小实验时,将一根橡皮筋一端系一质量为m的小球,另一端固定在a点,b点是橡皮筋不系小球自然下垂时下端所在的位置,c点是小球从a点自由下落所能到达的最低点.在小球从a点到c点运动的过程中,不考虑空气阻力,以下说法正确的是( )
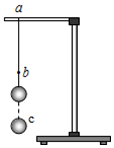
如图所示,小明在做模拟“蹦极”的小实验时,将一根橡皮筋一端系一质量为m的小球,另一端固定在a点,b点是橡皮筋不系小球自然下垂时下端所在的位置,c点是小球从a点自由下落所能到达的最低点.在小球从a点到c点运动的过程中,不考虑空气阻力,以下说法正确的是( )
如图所示,小明在做模拟“蹦极”的小实验时,将一根橡皮筋一端系一质量为m的小球,另一端固定在a点,b点是橡皮筋不系小球自然下垂时下端所在的位置,c点是小球从a点自由下落所能到达的最低点.在小球从a点到c点运动的过程中,不考虑空气阻力,以下说法正确的是( )| A. | 小球到达b点时,处于二力平衡状态 | |
| B. | 小球到达c点时,所受重力大于弹力 | |
| C. | 小球的动能一直在增加,重力势能一直在减小 | |
| D. | 在c点小球的动能为零,橡皮筋的弹性势能最大 |
11. 某同学用如图所示的实验装置测量滑轮组的机械效率,相关数据记录在下表中.
某同学用如图所示的实验装置测量滑轮组的机械效率,相关数据记录在下表中.
(1)实验中,使用滑轮组提升重物时,应竖直向上匀速拉动弹簧测力计.
(2)第三次实验中,绳端移动的距离为0.45m,滑轮组的机械效率为80%.
(3)分析比较第一、二两次实验数据,由此可知,可采用增大提升物体的重力的方法来提高滑轮组的机械效率.分析比较第二、三两次实验数据,由此可知,滑轮组的机械效率与提升物体的高度无关.
某同学用如图所示的实验装置测量滑轮组的机械效率,相关数据记录在下表中.| 实验 次数 | 钩码重/N | 钩码上升的 高度/m | 绳端的 拉力/N | 绳端移动的 距离/m | 机械效率 |
| 1 | 4 | 0.10 | 1.8 | 0.3 | |
| 2 | 6 | 0.10 | 2.5 | 0.3 | |
| 3 | 6 | 0.15 | 2.5 |
(2)第三次实验中,绳端移动的距离为0.45m,滑轮组的机械效率为80%.
(3)分析比较第一、二两次实验数据,由此可知,可采用增大提升物体的重力的方法来提高滑轮组的机械效率.分析比较第二、三两次实验数据,由此可知,滑轮组的机械效率与提升物体的高度无关.

15. 一根细长绳的下端系一金属小球,上端固定,制成一个摆,把小球拉离竖直位置松手,使小球从A点经过最低点O到达B点,如图.不考虑各种阻力,小球在摆动过程中机械能(E)随小球高度(h)变化关系是( )
一根细长绳的下端系一金属小球,上端固定,制成一个摆,把小球拉离竖直位置松手,使小球从A点经过最低点O到达B点,如图.不考虑各种阻力,小球在摆动过程中机械能(E)随小球高度(h)变化关系是( )
一根细长绳的下端系一金属小球,上端固定,制成一个摆,把小球拉离竖直位置松手,使小球从A点经过最低点O到达B点,如图.不考虑各种阻力,小球在摆动过程中机械能(E)随小球高度(h)变化关系是( )| A. | 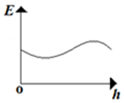 | B. | 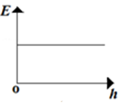 | C. | 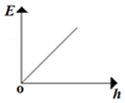 | D. | 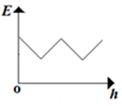 |
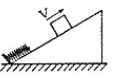
15.用弹簧测力计拉着木块在水平面上匀速运动,保持弹簧测力计示数稳定,则( )

| A. | 木块受到的拉力大于摩擦力 | |
| B. | 木块相对弹簧测力计是运动的 | |
| C. | 木块受到的重力和水平面对木块的支持力是一对平衡力 | |
| D. | 在木块上放一钩码后,继续拉动木块匀速运动,弹簧测力计示数将变大 |
16.在研究杠杆平衡条件的实验中:
(1)所用的器材有铁架台、带刻度的杠杆、细线、钩码和弹簧测力计.
(2)实验前,先调节杠杆两端的平衡螺母.使杠杆在水平位置平衡.
(3)以挂在左边的钩码重力为动力,挂钩码的位置到支点的距离为动力臂.以挂在右边的钩码重力为阻力,挂钩码的位置到支点的距离为阻力臂.当杠杆在水平位置平衡时,得到的表格中第1、2两组数据,由此我们可以得到的结论:F1L1=F2L2.
(4)再以弹簧秤的拉力为阻力,弹簧秤在杠杆上的作用点的位置到支点的距离为阻力臂.当杠杆在水平位置静止时,得到表格中第3组数据,由此我们判断造成这个结果的原因可能是阻力臂测量错误.
(1)所用的器材有铁架台、带刻度的杠杆、细线、钩码和弹簧测力计.
(2)实验前,先调节杠杆两端的平衡螺母.使杠杆在水平位置平衡.
(3)以挂在左边的钩码重力为动力,挂钩码的位置到支点的距离为动力臂.以挂在右边的钩码重力为阻力,挂钩码的位置到支点的距离为阻力臂.当杠杆在水平位置平衡时,得到的表格中第1、2两组数据,由此我们可以得到的结论:F1L1=F2L2.
| 实验次数 | 动力(牛) | 动力臂(厘米) | 阻力(牛) | 阻力臂(厘米 |
| 1 | 4 | 10 | 2 | 20 |
| 2 | 2 | 15 | 3 | 10 |
| 3 | 3 | 10 | 2 | 20 |