题目内容
2.为了探究同一种物质的物体质量跟体积的关系,小明同学使用天平和量筒分别测出水和酒精的质量和体积,得到表中数据:(1)比较第①②③三次实验数据,可以得出结论:同种物质组成的物体,它的质量跟它的体积成正比
(2)比较六次实验的“质量”和“体积”栏中的数据,可以进一步得出的结论是:同种物质,其质量与体积的比值相同;不同种物质组成的物体,其质量与体积的比值一般不同(填相同、不同),为此我们引入了一个物理量来反映这一特性,这个物理量是密度.
| 物质 | 实验次数 | 体积(cm3) | 质量(g) | 质量/体积(g/cm3) |
| 水 | ① | 5 | 5 | 1 |
| ② | 10 | 10 | 1 | |
| ③ | 20 | 20 | 1 | |
| 酒精 | ④ | 5 | 4 | 0.8 |
| ⑤ | 10 | 8 | 0.8 | |
| ⑥ | 20 | 16 | 0.8 |
分析 (1)实验数据①②③物质种类相同,质量与体积的关系按照先纵比体积、质量的变化规律,再横比质量、体积的对应关系;
(2)不同物质,体积相同,质量不相同,由此得到质量与体积的比值的大小关系;物理学上,用密度比较相同体积的不同物质质量的大小.
解答 解:
(1)①②③数据,水的密度一定,纵向看:体积成倍增加,质量也成倍增加,并且增加的倍数相同;横向看:质量、体积比值相同.也就是同种物质,质量与体积成正比;
(2)比较六次实验的“质量”和“体积”栏中的数据可知:不同物质,体积相同,质量不同,所以质量与体积的比值不同;
不同物质,质量与体积的比值不同,在物理学中用密度描述这一特性.
故答案为:(1)正比;(2)相同;不同;密度.
点评 根据数据得出结论是学习物理的基本要求,也是学物理的基本能力,注意培养这种能力,其中涉及到的控制变量法研究思想.

练习册系列答案
 全优点练单元计划系列答案
全优点练单元计划系列答案
相关题目
16.下列措施中,可以减慢蒸发的是( )
| A. | 将湿毛巾在阳光下晾晒 | B. | 将地面上的积水向周围扫开 | ||
| C. | 用电吹风机吹潮湿的头发 | D. | 将蔬菜装入保鲜袋,放在冰箱里 |
 如图所示电路中,R是阻值为6Ω的定值电阻,灯泡L1、L2分别标有“6V 3W”和“3V 1.5W”,电源电压保持不变.
如图所示电路中,R是阻值为6Ω的定值电阻,灯泡L1、L2分别标有“6V 3W”和“3V 1.5W”,电源电压保持不变.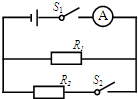 如图所示的电路中,R1的阻值为10Ω,只闭合开关S1时电流表的示数为0.3A,再闭合开关S2后,电流表的示数为0.45A,求:
如图所示的电路中,R1的阻值为10Ω,只闭合开关S1时电流表的示数为0.3A,再闭合开关S2后,电流表的示数为0.45A,求:
17.阅读短文,回答问题:
智能扫地机器人
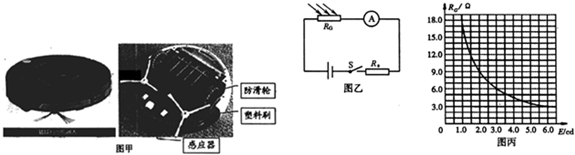
智能扫地机器人是一款能自动清扫的家用电器,如图甲所示.机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其防滑轮上印有凸凹不平的花纹;底部安装有塑料刷,用于清扫吸附在地板或地毯上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.表一为某扫地机器人的部分参数.
表一:
机器人中吸尘电机的吸入功率是衡量其优劣的重要参数,测得某吸尘电机的吸入功率与真空度、风量间的对应关系如表二.真空度指主机内部气压与外界的气压差;风量指单位时间内通过吸尘电机排出的空气体积;吸尘电机吸入功率与输入功率的比值叫做效率.
表二:
(1)下列说法中错误的是B.
A.机器人通过电动机旋转产生高速气流,以此来减小主机内部的气压而产生吸力.
B.在地毯纤维内掺杂金属丝,会增加机器人对灰尘及轻小物体的清扫难度
C.防滑轮上印有凸凹不平的花纹,是为了增大机器人与地面间的摩擦
D.当遇到黑色真皮沙发等深色障碍物时,使用超声波感应器效果较好
(2)若该机器人向障碍物垂直发射超声波,经过0.02s收到回波,则其发射超声波时与障碍物间的距离约为3.4m(此空答案保留一位小数);在这段时间内机器人向前行进的距离为0.006m.
(3)电池容量“2000mAh”是指当工作电流为2000mA,能持续供电1h.该机器人充满电后至下一次自动充电前能够连续正常工作的最长时间为0.64h.假设返回充电过程中受到的阻力为36N,剩余电池容量支持正常工作所能做的电功的20%用于克服阻力做功,为确保机器人能顺利返回充电,需要充电时离充电座最远为96 m.
(4)由表二数据可知,当风量为0.015m3/s时,若吸尘电机的输入功率为25W,此时其效率为33%;上述风量下,5min内通过吸尘电机提出的空气质量为5.85kg.(ρ空气=1.3kg/m3)
(5)光敏电阻是制作灰尘传感器的常用元件,图乙为光敏电阻的控制电路,电源电压U恒定,空气中的灰尘浓度会影响空气透光程度,RG为光敏电阻,其阻值随光照射的强弱而改变.“光强”表示光的强弱程度的物理量,照射光越强,光强越大,光强符号用E表示,国际单位为坎德拉(cd).实验测得光敏电阻的阻值RG与光强E间的关系如图丙所示,R0为定值电阻.当光照强度为4.5cd时,电流表的读数为0.5A;当光照强度为1.5cd时,电流表的读数为0.3A,则R0=8Ω.为监测空气的透光程度,现将电流表表盘的电流I刻度值转化为对应的总阻值(R0+RG ),则转化后表盘上从左到右相邻两刻度线对应总阻值的差值将逐渐减小,原因是电流表的示数I与总阻值(R0+RG)成反比.
智能扫地机器人
智能扫地机器人是一款能自动清扫的家用电器,如图甲所示.机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其防滑轮上印有凸凹不平的花纹;底部安装有塑料刷,用于清扫吸附在地板或地毯上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.表一为某扫地机器人的部分参数.
表一:
| 额定工作电压 | 12V | 额定工作电流 | 2.5A |
| 电池容量 | 2000mAh | 行进速度 | 0.3m/s |
表二:
| 真空度/Pa | 400 | 450 | 500 | 550 | 600 |
| 风量/(m3/s) | 0.025 | 0.02 | 0.017 | 0.015 | 0.013 |
| 吸入功率/W | 10.00 | 9.00 | 8.50 | 8.25 | 7.80 |
A.机器人通过电动机旋转产生高速气流,以此来减小主机内部的气压而产生吸力.
B.在地毯纤维内掺杂金属丝,会增加机器人对灰尘及轻小物体的清扫难度
C.防滑轮上印有凸凹不平的花纹,是为了增大机器人与地面间的摩擦
D.当遇到黑色真皮沙发等深色障碍物时,使用超声波感应器效果较好
(2)若该机器人向障碍物垂直发射超声波,经过0.02s收到回波,则其发射超声波时与障碍物间的距离约为3.4m(此空答案保留一位小数);在这段时间内机器人向前行进的距离为0.006m.
(3)电池容量“2000mAh”是指当工作电流为2000mA,能持续供电1h.该机器人充满电后至下一次自动充电前能够连续正常工作的最长时间为0.64h.假设返回充电过程中受到的阻力为36N,剩余电池容量支持正常工作所能做的电功的20%用于克服阻力做功,为确保机器人能顺利返回充电,需要充电时离充电座最远为96 m.
(4)由表二数据可知,当风量为0.015m3/s时,若吸尘电机的输入功率为25W,此时其效率为33%;上述风量下,5min内通过吸尘电机提出的空气质量为5.85kg.(ρ空气=1.3kg/m3)
(5)光敏电阻是制作灰尘传感器的常用元件,图乙为光敏电阻的控制电路,电源电压U恒定,空气中的灰尘浓度会影响空气透光程度,RG为光敏电阻,其阻值随光照射的强弱而改变.“光强”表示光的强弱程度的物理量,照射光越强,光强越大,光强符号用E表示,国际单位为坎德拉(cd).实验测得光敏电阻的阻值RG与光强E间的关系如图丙所示,R0为定值电阻.当光照强度为4.5cd时,电流表的读数为0.5A;当光照强度为1.5cd时,电流表的读数为0.3A,则R0=8Ω.为监测空气的透光程度,现将电流表表盘的电流I刻度值转化为对应的总阻值(R0+RG ),则转化后表盘上从左到右相邻两刻度线对应总阻值的差值将逐渐减小,原因是电流表的示数I与总阻值(R0+RG)成反比.
7. 如图所示,将一底纹间隔相同且质量分布均匀的圆盘O挂在铁架台上,(忽略轴心摩擦)在P点处挂上3个质量相等的钩码,为了使圆盘能够重新平衡,下面的方法不可行的是( )
如图所示,将一底纹间隔相同且质量分布均匀的圆盘O挂在铁架台上,(忽略轴心摩擦)在P点处挂上3个质量相等的钩码,为了使圆盘能够重新平衡,下面的方法不可行的是( )
如图所示,将一底纹间隔相同且质量分布均匀的圆盘O挂在铁架台上,(忽略轴心摩擦)在P点处挂上3个质量相等的钩码,为了使圆盘能够重新平衡,下面的方法不可行的是( )| A. | 在A处挂3个钩码 | B. | 在B处挂3个钩码 | C. | 在C处挂2个钩码 | D. | 在D处挂1个钩码 |
 用一个600W的电热器对某液体加热,如图所示是液体的温度随时间变化的图线(设电热器提供的热量全部被液体所吸收).在5min时间内,液体吸收的热量是1.8×105J,若该液体的质量为1Kg,则液体的比热容是3600J/(Kg•℃)
用一个600W的电热器对某液体加热,如图所示是液体的温度随时间变化的图线(设电热器提供的热量全部被液体所吸收).在5min时间内,液体吸收的热量是1.8×105J,若该液体的质量为1Kg,则液体的比热容是3600J/(Kg•℃) 如图所示,锤头松动时,用力敲锤柄是利用惯性使锤头套紧;许多机器的轴上都装了滚动轴承,道理在于减小摩擦.
如图所示,锤头松动时,用力敲锤柄是利用惯性使锤头套紧;许多机器的轴上都装了滚动轴承,道理在于减小摩擦.