题目内容
1.图甲是小灯泡L和电阻R的电流随电压变化图象,将它们按图乙所示接人电路中,只闭合开关S,小灯泡的实际功率为1W;
则小灯泡两端的电压为2V,再闭合开关S1,电流表示数变化了0.2A,此时电路消耗的总功率为1.4 W.
分析 (1)只闭合开关S时,电路为L的简单电路,根据图象读出小灯泡实际功率为1W两端的电压和电流;
(2)闭合开关S、S1时,L与R并联,电流表测干路电流,根据并联电路的电压特点可知它们两端的电压,根据图象可知通过它们的电流,利用并联电路的电流特点可知电流表示数的变化和干路电流表的示数,利用P=UI求出电路消耗的总功率.
解答 解:(1)只闭合开关S时,电路为L的简单电路,
由图中可知,当小灯泡两端的电压UL=2V,通过的电流IL=0.5A时,
灯泡的实际功率PL=ULIL=2V×0.5A=1W,
所以,小灯泡两端的电压为2V,电源的电压约为2V;
(2)闭合开关S、S1时,L与R并联,电流表测干路电流,
因并联电路中各支路两端的电压相等,
所以,它们两端的电压UL=UR=U=2V,
由图象可知,通过它们的电流分别为IL=0.5A,IR=0.2A,
因串联电路中干路电流等于各支路电流之和,
所以,电流表示数变化为IR=0.2A,
此时干路电流:
I=IL+IR=0.5A+0.2A=0.7A,
此时电路消耗的总功率:
P=UI=2V×0.7A=1.4W.
故答案为:2;0.2;1.4.
点评 本题考查了并联电路的特点和电功率公式的应用,从图象中读出符合题意的电流和电压值以及知道电流表示数的变化量为通过R的电流是关键.

练习册系列答案
 世纪百通主体课堂小学课时同步达标系列答案
世纪百通主体课堂小学课时同步达标系列答案 世纪百通优练测系列答案
世纪百通优练测系列答案 百分学生作业本题练王系列答案
百分学生作业本题练王系列答案
相关题目
 如图所示甲、乙两块透镜,乙是凹透镜,它对光有发散作用,照相机的镜头相当于凸透镜,能作放大镜的是甲(后两空选填“甲”或“乙”).
如图所示甲、乙两块透镜,乙是凹透镜,它对光有发散作用,照相机的镜头相当于凸透镜,能作放大镜的是甲(后两空选填“甲”或“乙”). 如图中的电磁铁为一个中间有抽头的电磁铁的示意图,小明为了研究外形相同的电磁铁磁性的强弱与通电电流的大小及线圈匝数的关系.他做了如下实验,实验步骤为:
如图中的电磁铁为一个中间有抽头的电磁铁的示意图,小明为了研究外形相同的电磁铁磁性的强弱与通电电流的大小及线圈匝数的关系.他做了如下实验,实验步骤为:
16. 某班同学利用图甲实验装置完成“测滑轮组机械效率”的实验,各组实验数据确认无误后统计记录如下表:分析表中数据,回答一下问题:
某班同学利用图甲实验装置完成“测滑轮组机械效率”的实验,各组实验数据确认无误后统计记录如下表:分析表中数据,回答一下问题:
(1)第2次实验中滑轮组的机械效率是46.3%;实验中影响滑轮组效率的主要因素是钩码重与动滑轮重.
(2)小红在图甲实验的基础上多使用一个滑轮也做了实验,如图乙所示.
①小红多使用一个滑轮,目的是为了改变改变力的方向;
②当同学各自使用甲乙两图的滑轮组提升相同的重物时,若忽略绳重及摩擦,则η甲=η乙(填“>、=或<”),请论述你的理由:额外功和有用功都相同.
某班同学利用图甲实验装置完成“测滑轮组机械效率”的实验,各组实验数据确认无误后统计记录如下表:分析表中数据,回答一下问题:(1)第2次实验中滑轮组的机械效率是46.3%;实验中影响滑轮组效率的主要因素是钩码重与动滑轮重.
(2)小红在图甲实验的基础上多使用一个滑轮也做了实验,如图乙所示.
①小红多使用一个滑轮,目的是为了改变改变力的方向;
②当同学各自使用甲乙两图的滑轮组提升相同的重物时,若忽略绳重及摩擦,则η甲=η乙(填“>、=或<”),请论述你的理由:额外功和有用功都相同.
| 实验小组 | 钩码重 G/N | 物体上升的高度h/cm | 动滑轮 G’/N | 拉力 F/N | 滑轮组的机械效率η/% |
| 1 | 0.5 | 3 | 0.4 | 0.35 | 47.6 |
| 2 | 0.5 | 5 | 0.4 | 0.36 | |
| 3 | 1 | 5 | 0.6 | 0.62 | 53.8 |
| 4 | 1 | 5 | 0.8 | 0.71 | 46.9 |
| 5 | 2 | 5 | 0.6 | 0.98 | 68.0 |
| 6 | 2 | 5 | 0.8 | 1.06 | 62.9 |

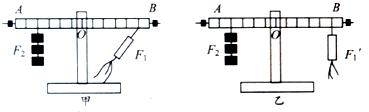
13.在探究实验过程中,我们不但要知道实验该如何操作,更应该知道我们为什么这样操作.例如李翔同学在“探究杠杆的平衡条件”实验时:
(1)李翔在实验过程中产生了新的疑问:为什么要让杠杆在水平位置平衡进行实验?老师为了解决李翔提出的问题,让李翔先后用如图甲、乙所示的实验装置探究杠杆的平衡条件,通过实验李翔总结:乙图的实验方案比甲图的实验方案好,理由是乙方案便于测量力臂.
(2)李翔解决了疑问后,正确进行了实验,他记录的数据如下:
请在下面横线上写出分析处理实验数据的具体过程及验证结果.①分析处理实验数据的具体过程如下:分别计算出动力×动力臂(或F1L1)和阻力×阻力臂(或F2L2),
第一组:2N×6cm=12N•cm、3N×4cm=12N•cm;
第二组:3N×5cm=15N•cm、5N×3cm=15N•cm;
第三组:4N×4cm=16N•cm、8N×2cm=16N•cm;
经过比较发现:每一组的动力和动力臂的乘积与阻力和阻力臂的乘积都相等.
②验证的结果:经验证可得出杠杆平衡时满足:动力×动力臂=阻力×阻力臂(或F1L1=F2L2)..
(1)李翔在实验过程中产生了新的疑问:为什么要让杠杆在水平位置平衡进行实验?老师为了解决李翔提出的问题,让李翔先后用如图甲、乙所示的实验装置探究杠杆的平衡条件,通过实验李翔总结:乙图的实验方案比甲图的实验方案好,理由是乙方案便于测量力臂.
(2)李翔解决了疑问后,正确进行了实验,他记录的数据如下:
| 试验次数 | 动力F1N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 2 | 6 | 3 | 4 |
| 2 | 3 | 5 | 5 | 3 |
| 3 | 4 | 4 | 8 | 2 |
第一组:2N×6cm=12N•cm、3N×4cm=12N•cm;
第二组:3N×5cm=15N•cm、5N×3cm=15N•cm;
第三组:4N×4cm=16N•cm、8N×2cm=16N•cm;
经过比较发现:每一组的动力和动力臂的乘积与阻力和阻力臂的乘积都相等.
②验证的结果:经验证可得出杠杆平衡时满足:动力×动力臂=阻力×阻力臂(或F1L1=F2L2)..
 如图所示,一位同学用一把塑料尺子摩擦动物的皮毛,发现尺子能吸引纸屑等轻小物体,是因为尺子摩擦起电,吸引纸屑等轻小物体,同时她也发现摩擦过程中尺子会变热,这是因为尺子与毛皮相互摩擦做功,使尺子的内能增加、温度升高.
如图所示,一位同学用一把塑料尺子摩擦动物的皮毛,发现尺子能吸引纸屑等轻小物体,是因为尺子摩擦起电,吸引纸屑等轻小物体,同时她也发现摩擦过程中尺子会变热,这是因为尺子与毛皮相互摩擦做功,使尺子的内能增加、温度升高.