题目内容
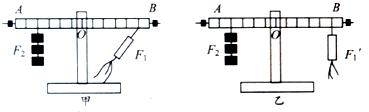
13.在探究实验过程中,我们不但要知道实验该如何操作,更应该知道我们为什么这样操作.例如李翔同学在“探究杠杆的平衡条件”实验时:(1)李翔在实验过程中产生了新的疑问:为什么要让杠杆在水平位置平衡进行实验?老师为了解决李翔提出的问题,让李翔先后用如图甲、乙所示的实验装置探究杠杆的平衡条件,通过实验李翔总结:乙图的实验方案比甲图的实验方案好,理由是乙方案便于测量力臂.
(2)李翔解决了疑问后,正确进行了实验,他记录的数据如下:
| 试验次数 | 动力F1N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 2 | 6 | 3 | 4 |
| 2 | 3 | 5 | 5 | 3 |
| 3 | 4 | 4 | 8 | 2 |
第一组:2N×6cm=12N•cm、3N×4cm=12N•cm;
第二组:3N×5cm=15N•cm、5N×3cm=15N•cm;
第三组:4N×4cm=16N•cm、8N×2cm=16N•cm;
经过比较发现:每一组的动力和动力臂的乘积与阻力和阻力臂的乘积都相等.
②验证的结果:经验证可得出杠杆平衡时满足:动力×动力臂=阻力×阻力臂(或F1L1=F2L2)..
分析 (1)杠杆在水平位置平衡时,力的方向与杠杆垂直,力臂的长度可以直接从杠杆上读出来.
(2)记录中有四组数据,分别是动力、动力臂、阻力、阻力臂,分析动力与动力臂的乘积、阻力与阻力臂的乘积,得出杠杆的平衡条件.
解答 解:(1)力臂等于支点到力的作用线的距离,在乙图的实验方案中,当杠杆在水平位置平衡时,力的方向与杠杆垂直,力臂可以从杠杆标尺刻度上直接读出来.而甲图的实验方案中的力臂不便于测量,所以,乙图的实验方案好.
(2)①分析处理实验数据的具体过程如下:分别计算出动力×动力臂(或F1L1)和阻力×阻力臂(或F2L2),
第一组:2N×6cm=12N•cm、3N×4cm=12N•cm;
第二组:3N×5cm=15N•cm、5N×3cm=15N•cm;
第三组:4N×4cm=16N•cm、8N×2cm=16N•cm;
经过比较发现:每一组的动力和动力臂的乘积与阻力和阻力臂的乘积都相等.
②验证的结果:经验证可得出杠杆平衡时满足:动力×动力臂=阻力×阻力臂(或F1L1=F2L2).
故答案为:(1)乙方案便于测量力臂;
(2))①分析处理实验数据的具体过程如下:分别计算出动力×动力臂(或F1L1)和阻力×阻力臂(或F2L2),
第一组:2N×6cm=12N•cm、3N×4cm=12N•cm;
第二组:3N×5cm=15N•cm、5N×3cm=15N•cm;
第三组:4N×4cm=16N•cm、8N×2cm=16N•cm;
经过比较发现:每一组的动力和动力臂的乘积与阻力和阻力臂的乘积都相等.
②验证的结果:经验证可得出杠杆平衡时满足:动力×动力臂=阻力×阻力臂(或F1L1=F2L2).
点评 本题考查了杠杆平衡的条件,在实验时我们应注意:调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,以便能直接读出力臂.杠杆平衡的条件就是:动力×动力臂=阻力×阻力臂.

| 饮水桶容量 | 18.9L |
| 热水箱容量 | 0.8L |
| 额定电压 | 220V |
| 加热功率 | 500W |
| 保温功率 | 40W |
| 工作频率 | 50Hz |

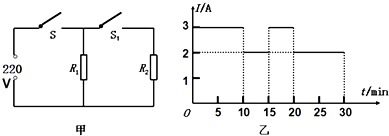
| A. | 这两只小灯泡一定是串联 | |
| B. | 这两只小灯泡一定是并联 | |
| C. | 这两只小灯泡可能是串联也可能是并联 | |
| D. | 无法确定 |
| A. | 利用干冰升华成的二氧化碳 | |
| B. | 利用干冰升华吸热,使空气液化成的雾 | |
| C. | 向舞台喷射的真实烟雾 | |
| D. | 利用干冰升华吸热,使水蒸气液化成的雾 |
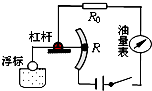 如图是表示一种自动测定油箱内油面高度的油量表(实际上是量程为0~0.6A的电流表改装而成),金属杠杆的右端是滑动变阻器的滑片.从油量表指针所指的刻度,就可以知道油箱内油面的高度.电源电压为24V,R0为定值电阻.
如图是表示一种自动测定油箱内油面高度的油量表(实际上是量程为0~0.6A的电流表改装而成),金属杠杆的右端是滑动变阻器的滑片.从油量表指针所指的刻度,就可以知道油箱内油面的高度.电源电压为24V,R0为定值电阻.