搜索
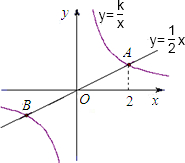
如图,已知正比例函数
y=
1
2
x
与反比例函数
y=
k
x
的图象交于A、B两点,点A的横坐标
为2.
(1)请求反比例函数的解析式及A、B两点的坐标;
(2)根据图象直接写出:当x取何值时反比例函数的值大于一次函数的值.
某战士开车从A地出发到离A地100千米处的B地执行任务,出发1小时后,发现按原速行驶要迟到30分钟,于是将车速提高了一倍,恰好准时到达,求原来的车速.
解方程:
1
x-2
=
4
x
2
-4
.
计算
(1)
(
3
+1
)
0
+(-
1
4
)-1
;
(2)
(1-
1
1-a
)(
1
a
2
-1)
.
现有两根木棒的长度分别是60cm和100cm,若要钉成一个直角三角形木架,则第三根木棒的长度为
.
10、三边为a,b,c且(a+b)(a-b)=c
2
,则( )
A、边a的对角是直角
B、b边的对角是直角
C、c边的对角是直角
D、是斜三角形
下列各式
1
4
,
n
m
,
n
2
,
2
x+y
,
x
y
,
m-n
m+n
中分式的个数是( )
A、2
B、3
C、4
D、5
已知两条直线
y=
n
n+1
x+
2
n+1
和
y=-
n
n+1
x+
2
n+1
(n为正整数),设它们与x轴围成的图形面积为S
n
(n=1,2,…,2010),求S
1
+S
2
+…+S
2010
的值.
27、一个机器人从平面直角坐标系原点出发,按下列程序运动:第一次先沿x轴正方向前进3步,再沿y轴正方向前进3步到达A
1
(3,3)点;第二次运动是由A
1
点先沿x轴的负方向前进2步,再沿y轴负方向前进2步到达A
2
(1,1)点;第三次运动是由A
2
点先沿x轴正方向前进3步,再沿y轴正方向前进3个步到达A
3
点;第四次运动是由A
3
点先沿x轴的负方向前进2步,再沿y轴负方向前进2步到达A
4
点;…,以后的运动按上述程序交替进行.已知该机器人每秒走1步,且每步的距离为1个单位.
(1)若第30秒时它到达点A
k
,则k=
6
;
(2)该机器人到达点A
99
时,一共运动了
496
秒,A
99
的坐标是
(52,52)
.
26、已知a,b,k均为整数,则满足等式(x+a)(x+b)=x
2
+kx+30的所有的k值有
8
个.
0
71303
71311
71317
71321
71327
71329
71333
71339
71341
71347
71353
71357
71359
71363
71369
71371
71377
71381
71383
71387
71389
71393
71395
71397
71398
71399
71401
71402
71403
71405
71407
71411
71413
71417
71419
71423
71429
71431
71437
71441
71443
71447
71453
71459
71461
71467
71471
71473
71479
71483
71489
71497
366461
关 闭
试题分类
高中
数学
英语
物理
化学
生物
地理
初中
数学
英语
物理
化学
生物
地理
小学
数学
英语
其他
阅读理解答案
已回答习题
未回答习题
题目汇总
试卷汇总
练习册解析答案
 为2.
为2.