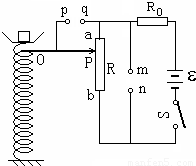
深沉的夜色中,在大海上航行的船舶依靠航标灯指引航道.如图所示是一个航标灯自动控制电路的示意图.电路中的光电管阴极K涂有可发生光电效应的金属.下表反映的是各种金属发生光电效应的极限频率和极限波长,又知可见光的波长在400nm~770nm (1nm=10-9m ).

各种金属发生光电效应的极限频率和极限波长
根据上图和所给出各种数据,你认为
(1)光电管阴极K上应涂有金属______;
(2)控制电路中的开关K应和______(填“a”或“b”)接触;
(3)工人在锻压机、冲床、钻床等机器上劳动时,稍有不慎就会把手压在里面,造成工伤事故.如果将上述控制电路中的电灯换成驱动这些机器工作的电机,这时电路中开关K应和______接触,这样,当工人不慎将手伸入危险区域时,由于遮住了光线,光控继电器衔铁立即动作,使机床停止工作,避免事故发生.
各种金属发生光电效应的极限频率和极限波长
| 金属 | 铯 | 钠 | 锌 | 银 | 铂 |
| 极限频率(Hz) | 4.545×1014 | 6.000×1014 | 8.065×1014 | 1.153×1015 | 1.529×1015 |
| 极限波长(μm) | 0.6600 | 0.5000 | 0.3720 | 0.2600 | 0.1962 |
(1)光电管阴极K上应涂有金属______;
(2)控制电路中的开关K应和______(填“a”或“b”)接触;
(3)工人在锻压机、冲床、钻床等机器上劳动时,稍有不慎就会把手压在里面,造成工伤事故.如果将上述控制电路中的电灯换成驱动这些机器工作的电机,这时电路中开关K应和______接触,这样,当工人不慎将手伸入危险区域时,由于遮住了光线,光控继电器衔铁立即动作,使机床停止工作,避免事故发生.
模块机器人具有三个部分,它们分别是传感器、控制器和执行器.模块机器人的控制器内存有5种控制方法:
传感器模块有光传感器、声传感器、温度传感器、磁传感器等.
执行器模块为小灯模块、电动机模块.
某同学要设计一个装置,当有光照射且有声音时,电动机才会转,则控制器序号应调为______(填数字),传感器应使用______.
0 69125 69133 69139 69143 69149 69151 69155 69161 69163 69169 69175 69179 69181 69185 69191 69193 69199 69203 69205 69209 69211 69215 69217 69219 69220 69221 69223 69224 69225 69227 69229 69233 69235 69239 69241 69245 69251 69253 69259 69263 69265 69269 69275 69281 69283 69289 69293 69295 69301 69305 69311 69319 176998
| 序号 | 控制方法 |
| 01 | 即时控制 |
| 02 | 延迟控制 |
| 03 | “与”门控制 |
| 04 | “或”门控制 |
| 05 | “非”门控制 |
执行器模块为小灯模块、电动机模块.
某同学要设计一个装置,当有光照射且有声音时,电动机才会转,则控制器序号应调为______(填数字),传感器应使用______.