0 15958 15966 15972 15976 15982 15984 15988 15994 15996 16002 16008 16012 16014 16018 16024 16026 16032 16036 16038 16042 16044 16048 16050 16052 16053 16054 16056 16057 16058 16060 16062 16066 16068 16072 16074 16078 16084 16086 16092 16096 16098 16102 16108 16114 16116 16122 16126 16128 16134 16138 16144 16152 176998
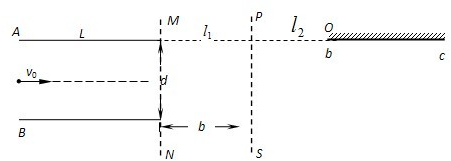
 如图所示,平板A长l=10m,质量M=4kg,放在光滑的水平面上.在A上最右端放一物块B(大小可忽略),其质量m=2kg.已知A、B间动摩擦因数μ=0.4,开始时A、B都处于静止状态(取g=10m/s2).则
如图所示,平板A长l=10m,质量M=4kg,放在光滑的水平面上.在A上最右端放一物块B(大小可忽略),其质量m=2kg.已知A、B间动摩擦因数μ=0.4,开始时A、B都处于静止状态(取g=10m/s2).则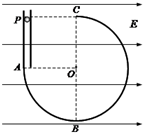 如图所示,ABC是固定在竖直平面内的绝缘圆弧轨道,圆弧半径为R.A点与圆心O等高,B、C点处于竖直直径的两端.PA是一段绝缘的竖直圆管,两者在A点平滑连接,整个装置处于方向水平向右的匀强电场中.一质量为m、电荷量为+q的小球从管内与C点等高处由静止释放,一段时间后小球离开圆管进入圆弧轨道运动.已知匀强电场的电场强度
如图所示,ABC是固定在竖直平面内的绝缘圆弧轨道,圆弧半径为R.A点与圆心O等高,B、C点处于竖直直径的两端.PA是一段绝缘的竖直圆管,两者在A点平滑连接,整个装置处于方向水平向右的匀强电场中.一质量为m、电荷量为+q的小球从管内与C点等高处由静止释放,一段时间后小球离开圆管进入圆弧轨道运动.已知匀强电场的电场强度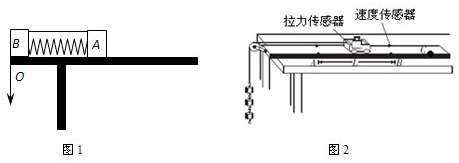
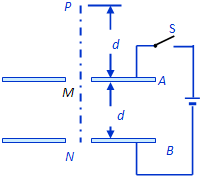 如图所示,A、B为平行金属板,两板相距d,分别与电源两极相连,两板的中央各有一个小孔M、N.开关S先闭合,今有一带电粒子自A板上方相距为d的P点由静止自由下落,空气阻力不计,到达N孔时速度恰好为零,然后沿原路返回.(P、M、N在同一竖直线上,且忽略极板的边缘效应),则( )
如图所示,A、B为平行金属板,两板相距d,分别与电源两极相连,两板的中央各有一个小孔M、N.开关S先闭合,今有一带电粒子自A板上方相距为d的P点由静止自由下落,空气阻力不计,到达N孔时速度恰好为零,然后沿原路返回.(P、M、N在同一竖直线上,且忽略极板的边缘效应),则( )