1.质点做直线运动的位移x与时间t的关系为x=5t+t2(各物理量均采用国际单位制),则该质点( )
| A. | 质点的初速度为5m/s | B. | 质点的加速度为1m/s2 | ||
| C. | 任意相邻1s内的位移差都是1m | D. | 第1s内的位移是5m |
20.2008年9月25日晚21点10分,我国在九泉卫星发射中心将我国自行研制的“神舟7号”宇宙飞船成功地送上太空,飞船绕地球飞行一圈时间为90分钟.则( )
| A. | “21点10分”和“90分钟”前者表示“时刻”后者表示“时间” | |
| B. | 卫星绕地球飞行一圈,它的位移和路程都为0 | |
| C. | 卫星绕地球飞行一圈平均速度不为0 | |
| D. | 地面卫星控制中心在对飞船进行飞行姿态调整时可以将飞船看作质点 |
19.为了测定电源电动势E的大小、内电阻r和定值电阻R0的阻值,某同学利用DIS设计了如图甲所示的电路.闭合电键S1,调节滑动变阻器的滑动触头P向某一方向移动时,用电压传感器1、电压传感器2和电流传感器测得数据,并根据测量数据计算机分别描绘了如图乙所示的M、N两条U-I直线.请回答下列问题:
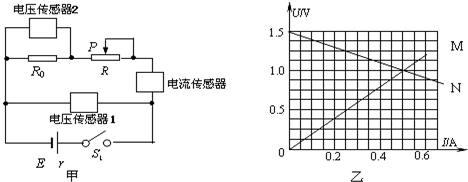
(1)根据图乙中的M、N两条直线可知BC
A.直线M是根据电压传感器1和电流传感器的数据画得的
B.直线M是根据电压传感器2和电流传感器的数据画得的
C.直线N是根据电压传感器1和电流传感器的数据画得的
D.直线N是根据电压传感器2和电流传感器的数据画得的
(2)图象中两直线交点处电路中的工作状态是ABC
(3)根据图乙可以求得定值电阻R0=2.0Ω,电源电动势E=1.50V,内电阻r=1.0Ω.
(1)根据图乙中的M、N两条直线可知BC
A.直线M是根据电压传感器1和电流传感器的数据画得的
B.直线M是根据电压传感器2和电流传感器的数据画得的
C.直线N是根据电压传感器1和电流传感器的数据画得的
D.直线N是根据电压传感器2和电流传感器的数据画得的
(2)图象中两直线交点处电路中的工作状态是ABC
| A.滑动变阻器的滑动头P滑到了最左端 | B.该电源在该电路中的输出功率最大 |
| C.定值电阻R0上消耗的功率为0.5W | D.该电源在该电路中的效率达到最大值 |

17.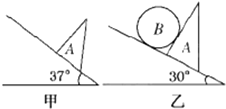 截面为直角三角形的木块A质量为M,放在倾角为θ的斜面上,当θ=37°时,木块恰能静止在斜面上.现将θ改为30°,在A与斜面间放一质量为m的光滑圆柱体B,如图乙,(sin37°=0.6,cos37°=0.8)则( )
截面为直角三角形的木块A质量为M,放在倾角为θ的斜面上,当θ=37°时,木块恰能静止在斜面上.现将θ改为30°,在A与斜面间放一质量为m的光滑圆柱体B,如图乙,(sin37°=0.6,cos37°=0.8)则( )
截面为直角三角形的木块A质量为M,放在倾角为θ的斜面上,当θ=37°时,木块恰能静止在斜面上.现将θ改为30°,在A与斜面间放一质量为m的光滑圆柱体B,如图乙,(sin37°=0.6,cos37°=0.8)则( )| A. | A、B仍一定静止于斜面上 | |
| B. | 若M=2m,则A受到的摩擦力为$\frac{3}{2}$mg | |
| C. | 若M=8m,则A受到斜面的摩擦力为$\frac{9}{2}$mg | |
| D. | 以上说法都不对 |
 一辆汽车在笔直的公路上做匀加速直线运动,该公路每隔15m安置一个路标,如图所示,汽车通过AB两相邻路标用了3s,通过BC两路标用了2s,求汽车通过A、B、C三个路标时的速度.
一辆汽车在笔直的公路上做匀加速直线运动,该公路每隔15m安置一个路标,如图所示,汽车通过AB两相邻路标用了3s,通过BC两路标用了2s,求汽车通过A、B、C三个路标时的速度.
14.在一次跳伞训练中,伞兵从悬停在空中的直升机上跳出后,初速度v0>0,加速度a>0,下降过程中a值不断减小直至为零时,该伞兵的( )
| A. | 速度不断减小,位移先增大后减小 | |
| B. | 速度随时间均匀的增加 | |
| C. | 位移也随时间均匀增加 | |
| D. | 速度不断增大,当a=0时,速度达到最大,位移不断增大 |
13.质点做直线运动的v-t图象如图所示,则( )

| A. | 质点正方向位移在第三秒时到达最大值 | |
| B. | 第二秒末质点的速度方向和加速度方向都会改变 | |
| C. | 后两秒内质点坐匀变速直线运动 | |
| D. | 第3秒内做匀减速直线运动 |
12.A、B两质点的v-t图象如图所示,关于A、B两质点的运动,下列说法中正确的是( )

0 133036 133044 133050 133054 133060 133062 133066 133072 133074 133080 133086 133090 133092 133096 133102 133104 133110 133114 133116 133120 133122 133126 133128 133130 133131 133132 133134 133135 133136 133138 133140 133144 133146 133150 133152 133156 133162 133164 133170 133174 133176 133180 133186 133192 133194 133200 133204 133206 133212 133216 133222 133230 176998
| A. | 质点A和B都是匀速直线运动,且它们的速度相同 | |
| B. | 在相同的时间内,质点A、B的位移大小相同 | |
| C. | 质点B在3秒内位移是6m | |
| D. | 质点A在第2秒内的位移是4m |