0 46731 46739 46745 46749 46755 46757 46761 46767 46769 46775 46781 46785 46787 46791 46797 46799 46805 46809 46811 46815 46817 46821 46823 46825 46826 46827 46829 46830 46831 46833 46835 46839 46841 46845 46847 46851 46857 46859 46865 46869 46871 46875 46881 46887 46889 46895 46899 46901 46907 46911 46917 46925 235360

 如图所示,单摆在竖直平面内左右摆动,滚摆在竖直平面内上下往复运动.请回答:
如图所示,单摆在竖直平面内左右摆动,滚摆在竖直平面内上下往复运动.请回答: 某建筑工地用如图所示的简易滑轮组将重5000N的砖块运到离地3m高的砌墙处,已知每个滑轮重100N,滑轮摩擦和绳重以及动滑轮下的挂网重忽略不计.若提升砖块的工人作用于绳的拉力最大为450N,求:
某建筑工地用如图所示的简易滑轮组将重5000N的砖块运到离地3m高的砌墙处,已知每个滑轮重100N,滑轮摩擦和绳重以及动滑轮下的挂网重忽略不计.若提升砖块的工人作用于绳的拉力最大为450N,求: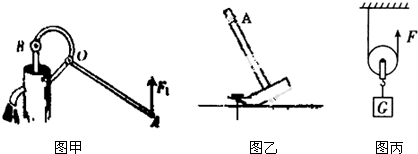
 小丽同学用如图所示的定滑轮匀速提升G=90N的重物,小丽向下用力,重物向
小丽同学用如图所示的定滑轮匀速提升G=90N的重物,小丽向下用力,重物向 如图所示的电路中,当滑动变阻器接入电路的电阻为滑动变阻器最大电阻值的三分之一时,电路中标有“12V 12W”的灯泡正常发光.当滑动变阻器接入电路的电阻等于它的最大阻值时,灯泡的实际电功率为3W.求滑动变阻器的最大阻值和电源的电压.(设灯泡电阻不变)
如图所示的电路中,当滑动变阻器接入电路的电阻为滑动变阻器最大电阻值的三分之一时,电路中标有“12V 12W”的灯泡正常发光.当滑动变阻器接入电路的电阻等于它的最大阻值时,灯泡的实际电功率为3W.求滑动变阻器的最大阻值和电源的电压.(设灯泡电阻不变)