
 4、目前,网络上制造中国自己航母的呼声越来越高,如图所示是网友提出的中国航母设想图.一艘航母的舰载机飞离航母后,航母底部受到的水的压强和航母受到的浮力将( )
4、目前,网络上制造中国自己航母的呼声越来越高,如图所示是网友提出的中国航母设想图.一艘航母的舰载机飞离航母后,航母底部受到的水的压强和航母受到的浮力将( )
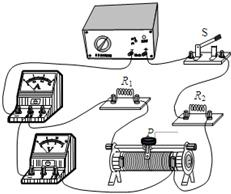 如下图所示的电路中,电源两端的电压不变.闭合开关S,当滑动变阻器接入电路中的电阻为RA时,电压表示数为6V,电流表示数为I1,电阻R1与滑动变阻器消耗的电功率之和为P1;当滑动变阻器接入电路中的电阻为RB时,电压表示数为9V,电流表示数为I2,电阻R1与滑动变阻器消耗的电功率之和为P2.已知:P1等于P2,电阻R1与R2之比为1:2.求:
如下图所示的电路中,电源两端的电压不变.闭合开关S,当滑动变阻器接入电路中的电阻为RA时,电压表示数为6V,电流表示数为I1,电阻R1与滑动变阻器消耗的电功率之和为P1;当滑动变阻器接入电路中的电阻为RB时,电压表示数为9V,电流表示数为I2,电阻R1与滑动变阻器消耗的电功率之和为P2.已知:P1等于P2,电阻R1与R2之比为1:2.求: 34、小林用纸杯、塑料片和水做实验.他将纸杯装满水,用塑料片把杯口盖严,一只手按住塑料片,另一只手抓住杯底,在空中将纸杯倒过来.移开按塑料片的手后,他发现塑料片和被子里的水都不落下来,如图所示.小林对这一现象的解释是:塑料片和杯子里的水都不落下来是由于塑料片被水粘住了,与大气压无关.请你利用上述器材再补充必要的辅助器材,设计一个实验证明小林的解释是错误的.请你写出实验步骤和实验现象.
34、小林用纸杯、塑料片和水做实验.他将纸杯装满水,用塑料片把杯口盖严,一只手按住塑料片,另一只手抓住杯底,在空中将纸杯倒过来.移开按塑料片的手后,他发现塑料片和被子里的水都不落下来,如图所示.小林对这一现象的解释是:塑料片和杯子里的水都不落下来是由于塑料片被水粘住了,与大气压无关.请你利用上述器材再补充必要的辅助器材,设计一个实验证明小林的解释是错误的.请你写出实验步骤和实验现象.
小梅想探究杠杆平衡时动力和动力臂的关系.实验过程中,小梅保持阻力为2N,阻力臂为0.15m不变,然后改变动力臂L1和动力F1,并保持杠杆水平平衡,分别测量出动力臂L1和动力F1的数据如下表所示.
请你根据实验条件和实验数据帮助小梅归纳出动力F1跟动力臂L1的关系: .
0 34406 34414 34420 34424 34430 34432 34436 34442 34444 34450 34456 34460 34462 34466 34472 34474 34480 34484 34486 34490 34492 34496 34498 34500 34501 34502 34504 34505 34506 34508 34510 34514 34516 34520 34522 34526 34532 34534 34540 34544 34546 34550 34556 34562 34564 34570 34574 34576 34582 34586 34592 34600 235360
| L1/m | 0.3 | 0.25 | 0.15 | 0.1 | 0.06 | 0.05 |
| F1/N | 1 | 1.2 | 2 | 3 | 5 | 6 |

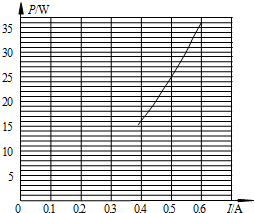 定值电阻R消耗的电功率P随通过R的电流I变化的图象如图所示.请根据图象判断:当通过R的电流I为0.3A时,电阻R消耗的电功率P为
定值电阻R消耗的电功率P随通过R的电流I变化的图象如图所示.请根据图象判断:当通过R的电流I为0.3A时,电阻R消耗的电功率P为