1. 小明同学在做电学实验时,连成的电路如图所示,已知他所用的电流表的量程为 0~0.6A,电压表的量程为0~3V,定值电阻R1为10Ω,滑动变阻器R2的 大阻值为50Ω,电源电压为6V且保持不变.当S闭合后,在实验操作正确的情况下,下列说法中正确的是( )
小明同学在做电学实验时,连成的电路如图所示,已知他所用的电流表的量程为 0~0.6A,电压表的量程为0~3V,定值电阻R1为10Ω,滑动变阻器R2的 大阻值为50Ω,电源电压为6V且保持不变.当S闭合后,在实验操作正确的情况下,下列说法中正确的是( )
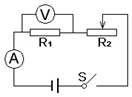
小明同学在做电学实验时,连成的电路如图所示,已知他所用的电流表的量程为 0~0.6A,电压表的量程为0~3V,定值电阻R1为10Ω,滑动变阻器R2的 大阻值为50Ω,电源电压为6V且保持不变.当S闭合后,在实验操作正确的情况下,下列说法中正确的是( )| A. | 电流表的示数为0.6A | B. | 电压表的示数为0.5V | ||
| C. | 滑动变阻器消耗的电功率为0W | D. | 电阻R1消耗的电功率为0.9W |
20. 如图所示,两个物体A和B,质量分别为M和m,用跨过光滑定滑轮的轻绳相连,已知M>m,A静止在水平地面上.不计滑轮质量,则( )
如图所示,两个物体A和B,质量分别为M和m,用跨过光滑定滑轮的轻绳相连,已知M>m,A静止在水平地面上.不计滑轮质量,则( )
如图所示,两个物体A和B,质量分别为M和m,用跨过光滑定滑轮的轻绳相连,已知M>m,A静止在水平地面上.不计滑轮质量,则( )| A. | 转轴O对滑轮的作用力大小为(M+m)g | |
| B. | 转轴O对滑轮的作用力大小为2mg | |
| C. | 水平地面对物体A的作用力大小为Mg | |
| D. | 物体A对水平地面的作用力大小为(M+m)g |
19.同学们在运动场上的一些场景如下,下列分析正确的是( )
| A. | 王浩同学踢出去的足球在草地上滚动时慢慢停下来,是因为足球没有受到力的作用 | |
| B. | 张红同学百米冲线后没有立即停下来,是因为一切物体都要受到惯性的作用 | |
| C. | 李宁同学正在跳高,当他腾跃到高点时,因为速度为0,所以处于平衡状态 | |
| D. | 张彦同学在打篮球,抛在空中的篮球只受重力作用(不考虑空气的阻力) |
18.关于热现象,下列说法正确的是( )
| A. | 秋天的早晨,大雾逐渐散去是液化现象 | |
| B. | 急刹车时车胎表面温度升高,这是由于热传递造成的 | |
| C. | 质量相同的水和煤油在相同的炉子上加热相同时间后,水比煤油温度升高得多 | |
| D. | 两种燃料热值之比为2:1,质量之比为1:4,它们完全燃烧放出的热量之比为1:2 |
17.下列说法中正确的是( )
| A. | 只要物体振动,就能听到声音 | |
| B. | “闻其声知其人”是依据声音的音色来判断的 | |
| C. | 声音在不同介质中的传播速度相同 | |
| D. | 乐器发出的声音都是乐音,不可能是噪声 |
16.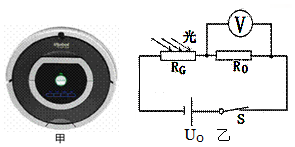 如图甲所示为一款能自动清扫地面的扫地机器人.机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其防滑轮皮采用凸凹材质制成;底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.表一为某扫地机器人的部分参数.电池容量指放电电流与放电总时间的乘积.表一:
如图甲所示为一款能自动清扫地面的扫地机器人.机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其防滑轮皮采用凸凹材质制成;底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.表一为某扫地机器人的部分参数.电池容量指放电电流与放电总时间的乘积.表一:
机器人中吸尘电机的吸入功率是衡量其优劣的重要参数,测得某吸尘电机的吸入功率与真空度、风量间的对应关系如表二.真空度指主机内部气压与外界的气压差.风量指单位时间内通过吸尘电机排出的空气体积.吸尘电机吸入功率与输入功率的比值叫做效率.表二:
(1)机器人工作时,主机内部的气压小于(选填“大于”、“小于”或“等于”)大气压而产生吸力.若该机器人向障碍物垂直发射超声波,经过0.001s收到回波,则其发射超声波时与障碍物间的距离为17cm.(设超声波在空气中的传播速度为340m/s)
(2)该机器人充满电后至下一次自动充电前,能够连续正常工作的最长时间为48min.
(3)由表二数据可知,当风量为0.015m3/s时,吸尘电机吸入功率为8.25W,若吸尘电机的输入功率为25W,此时其效率为33%.
(4)光敏电阻是制作灰尘传感器的常用元件.图乙为某机器人中吸尘电机内部的光敏电阻的控制电路,两端总电压U0恒定(U0<12V),RG为光敏电阻,其阻值随空气透光程度的变化而变化,R0为定值电阻.当光敏电阻分别为6Ω和18Ω时,电压表的示数分别为4.5V和2.25V,则R0=6Ω.
(5)若机器人1秒钟消耗的电能中有40%用于克服摩擦力做功.已知集尘盒空置时,机器人匀速运动时受到的摩擦阻力为16N,查阅资料显示摩擦力与压力成正比,则达到最大集尘量时机器人运动的速度为多少?(写出必要计算步骤)
0 175949 175957 175963 175967 175973 175975 175979 175985 175987 175993 175999 176003 176005 176009 176015 176017 176023 176027 176029 176033 176035 176039 176041 176043 176044 176045 176047 176048 176049 176051 176053 176057 176059 176063 176065 176069 176075 176077 176083 176087 176089 176093 176099 176105 176107 176113 176117 176119 176125 176129 176135 176143 235360
如图甲所示为一款能自动清扫地面的扫地机器人.机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其防滑轮皮采用凸凹材质制成;底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.表一为某扫地机器人的部分参数.电池容量指放电电流与放电总时间的乘积.表一:| 额定工作电压 | 12V | 额定功率 | 30W |
| 电池容量 | 2500mAh | 工作噪音 | <50dB |
| 净重 | 4kg | 最大集尘量 | 1kg |
| 真空度(Pa) | 400 | 450 | 500 | 550 | 600 |
| 风量(m3/s) | 0.025 | 0.02 | 0.017 | 0.015 | 0.013 |
| 吸入功率(W) | 10 | 9 | 8.5 | 7.8 |
(2)该机器人充满电后至下一次自动充电前,能够连续正常工作的最长时间为48min.
(3)由表二数据可知,当风量为0.015m3/s时,吸尘电机吸入功率为8.25W,若吸尘电机的输入功率为25W,此时其效率为33%.
(4)光敏电阻是制作灰尘传感器的常用元件.图乙为某机器人中吸尘电机内部的光敏电阻的控制电路,两端总电压U0恒定(U0<12V),RG为光敏电阻,其阻值随空气透光程度的变化而变化,R0为定值电阻.当光敏电阻分别为6Ω和18Ω时,电压表的示数分别为4.5V和2.25V,则R0=6Ω.
(5)若机器人1秒钟消耗的电能中有40%用于克服摩擦力做功.已知集尘盒空置时,机器人匀速运动时受到的摩擦阻力为16N,查阅资料显示摩擦力与压力成正比,则达到最大集尘量时机器人运动的速度为多少?(写出必要计算步骤)

 学校教学楼里安装的应急照明灯,内部结构如图所示.分电器的作用是把220V的交流高压转化为12V的直流低电压,并且分两路输出.在220V照明电源正常情况下,应急照明灯不工作(选填“工作”或“不工作”); 当照明电源突然停电时,灯泡与蓄电池所在电路形成通路(选填“通路”、“断路”或“短路”),实现自动应急照明.电磁铁的工作原理是通电导体周围存在磁场.
学校教学楼里安装的应急照明灯,内部结构如图所示.分电器的作用是把220V的交流高压转化为12V的直流低电压,并且分两路输出.在220V照明电源正常情况下,应急照明灯不工作(选填“工作”或“不工作”); 当照明电源突然停电时,灯泡与蓄电池所在电路形成通路(选填“通路”、“断路”或“短路”),实现自动应急照明.电磁铁的工作原理是通电导体周围存在磁场.