14.如图,在探究“杠杆的平衡条件”的实验中: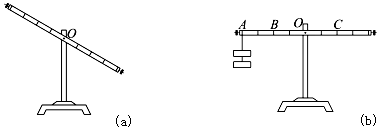
(1)实验前,杠杆在图(a)所示位置静止,杠杆处于平衡(选填“平衡”或“不平衡”)状态,此时应先将左边的平衡螺母向左调节,右边的平衡螺母向左调节,使杠杆在水平位置保持平衡,目的是为了便于测量力臂大小.
(2)操作时,把钩码分别挂在杠杆的两侧,改变钩码的个数或在杠杆上的力臂,使杠杆平衡.若不计杠杆质量和摩擦且杠杆刻度均匀,每个钩码均重1牛,如图(b)在A点挂两个钩码时,为了使杠杆恢复平衡,可以在C点挂4个钩码;或者在B点作用一个大小为4牛,方向竖直向上(选填“上”或“下”)的力.
(3)甲同学在实验中得出三组数据(如表).试根据它的实验结果归纳出杠杆的平衡条件是动力×动力臂=阻力×阻力臂(用文字表达).
(4)乙同学记录了如表数据,得出了“动力+动力臂=阻力+阻力臂”,该同学实验存在的问题是只测一组数据,得出结论具有偶然性,不具普遍性;不同单位的物理量不能相加.
(1)实验前,杠杆在图(a)所示位置静止,杠杆处于平衡(选填“平衡”或“不平衡”)状态,此时应先将左边的平衡螺母向左调节,右边的平衡螺母向左调节,使杠杆在水平位置保持平衡,目的是为了便于测量力臂大小.
(2)操作时,把钩码分别挂在杠杆的两侧,改变钩码的个数或在杠杆上的力臂,使杠杆平衡.若不计杠杆质量和摩擦且杠杆刻度均匀,每个钩码均重1牛,如图(b)在A点挂两个钩码时,为了使杠杆恢复平衡,可以在C点挂4个钩码;或者在B点作用一个大小为4牛,方向竖直向上(选填“上”或“下”)的力.
(3)甲同学在实验中得出三组数据(如表).试根据它的实验结果归纳出杠杆的平衡条件是动力×动力臂=阻力×阻力臂(用文字表达).
| 实验次数 | 动力F1(牛) | 动力臂l1(厘米) | 阻力F2(牛) | 阻力臂l2(厘米) |
| 1 | 2 | 5 | 1 | 10 |
| 2 | 4 | 10 | 8 | 5 |
| 3 | 3 | 6 | 2 | 9 |
| 动力F1(牛) | 动力臂l1(厘米) | 阻力F2(牛) | 阻力臂l2(厘米) |
| 3 | 4 | 4 | 3 |
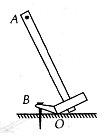 如图所示,用羊角锤可以拔钉子,羊角锤可以看做一个杠杆,在锤柄上A点画出最小力F的示意图.
如图所示,用羊角锤可以拔钉子,羊角锤可以看做一个杠杆,在锤柄上A点画出最小力F的示意图.
9.连通器在生产、生活中的应用非常广泛.图中没有利用连通器原理工作的是( )
| A. |  茶壶 | B. |  船闸 | C. |  活塞式抽水机 | D. |  下水道存水管 |
8.关于力和运动的关系,下列说法正确的是( )
| A. | 物体受到力的作用就会运动 | |
| B. | 物体受到力的作用,运动状态一定改变 | |
| C. | 物体运动状态改变时,一定受到力的作用 | |
| D. | 做匀速直线运动的物体一定不受力的作用 |
7.第一位通过理想实验发现并提出“物体的运动并不需要力来维持”的物理学家是( )
0 174906 174914 174920 174924 174930 174932 174936 174942 174944 174950 174956 174960 174962 174966 174972 174974 174980 174984 174986 174990 174992 174996 174998 175000 175001 175002 175004 175005 175006 175008 175010 175014 175016 175020 175022 175026 175032 175034 175040 175044 175046 175050 175056 175062 175064 175070 175074 175076 175082 175086 175092 175100 235360
| A. | 伽利略 | B. | 亚里士多德 | C. | 牛顿 | D. | 帕斯卡 |
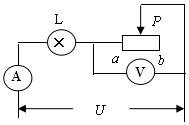 如图所示,电源电压不变,小灯泡标有“6V 3W”的字样,移动滑动变阻器的滑片P,当小灯泡正常发光时,电压表的示数为3V,求:
如图所示,电源电压不变,小灯泡标有“6V 3W”的字样,移动滑动变阻器的滑片P,当小灯泡正常发光时,电压表的示数为3V,求: