题目内容
1.画出相对应的电路图:
(1)当S1、S2均闭合且滑片P滑到a端时;
(2)当S1、S2均断开且滑片P在a端时.
分析 (1)当S1、S2均闭合且滑片P滑到a端时,滑动变阻器连入阻值为最大值,R2与R1并联,明确各电表所测物理量,由此画出电路图;
(2)当S1、S2均断开且滑片P在a端时,L与R1串联,明确各电表所测物理量,画出电路图.
解答 解:(1)当S1、S2均闭合且滑片P滑到a端时,滑动变阻器连入阻值为最大值,R2与R1并联,L短路,电压测电源电压,电流表A1测干路电流,A2测R2支路的电流,等效电路如下图所示: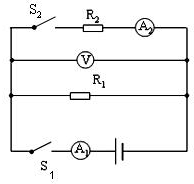
(2)当S1、S2均断开且滑片P在a端时,L与R1串联,R2断路,电压表测R1两端电压,电流表A1测电流中电流,等效电路如下图所示: .
.
点评 本题考查的是画等效电路,正确认识和理解串联和并联电路的特点是解题的关键,电路图的画法要规范.

练习册系列答案
相关题目



6. 小明用顺水漂流的乒乓球速度与水流速度相等,来测离渠边不同距离处水流速度.实验如下:选一段流速稳定、宽为2m的水平水渠为实验场地,如图甲所示,在A1A2连线上,同一时间把11个乒乓球等间距地轻轻放入水中,并开始计时,t=5秒时测得实验数据如表:
小明用顺水漂流的乒乓球速度与水流速度相等,来测离渠边不同距离处水流速度.实验如下:选一段流速稳定、宽为2m的水平水渠为实验场地,如图甲所示,在A1A2连线上,同一时间把11个乒乓球等间距地轻轻放入水中,并开始计时,t=5秒时测得实验数据如表:
图乙是该段水渠的横截面示意图.假如上述事实同样适用于水下,则实验时图乙中同一深度的B、C两点处的压强大小关系为( )
 小明用顺水漂流的乒乓球速度与水流速度相等,来测离渠边不同距离处水流速度.实验如下:选一段流速稳定、宽为2m的水平水渠为实验场地,如图甲所示,在A1A2连线上,同一时间把11个乒乓球等间距地轻轻放入水中,并开始计时,t=5秒时测得实验数据如表:
小明用顺水漂流的乒乓球速度与水流速度相等,来测离渠边不同距离处水流速度.实验如下:选一段流速稳定、宽为2m的水平水渠为实验场地,如图甲所示,在A1A2连线上,同一时间把11个乒乓球等间距地轻轻放入水中,并开始计时,t=5秒时测得实验数据如表:| 离渠中心距离r/米 | 0.10 | 0.20 | 0.40 | 0.60 | 0.80 | 1.00 |
| 乒乓球移动距离S/米 | 1.00 | 0.96 | 0.84 | 0.64 | 0.38 | 几乎为0 |
| 水流速度/米秒-1 | 0.200 | 0.192 | 0.168 | 0.128 | 0.076 | 几乎为0 |
| A. | pB>pC | B. | pB=pC | C. | pB<pC | D. | 无法判断 |
13.物理兴趣小组的同学,利用如图所示的装置,在杠杆支点的两边分别挂上钩码来探究杠杆的平衡条件.

(1)如图1所示,为使杠杆在水平位置平衡,应将右端的平衡螺母向右(选填“左”或“右”)移动,将杠杆调在水平位置平衡的目的是为了方便测量力臂.
(2)实验中测得的数据如表所示,表格中漏填的数据为1N.
(3)有的同学按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”.这个结论与杠杆平衡条件不符,原因是实验过程中B
A.没有改变力的大小 B.没有改变力的方向
C.没有改变力的作用点 D.实验次数较少,结论具有偶然
(4)如图3所示,弹簧测力计在C处由竖直向上逐渐向右倾斜拉动杠杆,仍使杠杆在水平位置保持平衡,则弹簧测力计的示数将变大(选填:变大、变小或保持不变),其原因是动力臂变小.
(5)如图4所示,实验小组选用长1.6m、粗细均匀的一只金属杆,绕O点在竖直平面内自由转动,同时将一个“拉力--位置传感器”竖直作用在杆上,并使杠杆在水平位置始终保持平衡.该传感器显示其拉力F与作用点到O点距离x的变化关系如图5所示.由图可知金属杆重10N.

(1)如图1所示,为使杠杆在水平位置平衡,应将右端的平衡螺母向右(选填“左”或“右”)移动,将杠杆调在水平位置平衡的目的是为了方便测量力臂.
(2)实验中测得的数据如表所示,表格中漏填的数据为1N.
| 测量 序号 | 动力 F1/N | 动力臂 l1/cm | 阻力 F2/N | 阻力臂 l2/cm |
| ① | 1 | 20 | 2 | 10 |
| ② | 2 | 15 | 1.5 | 20 |
| ③ | 3 | 5 | 15 |
A.没有改变力的大小 B.没有改变力的方向
C.没有改变力的作用点 D.实验次数较少,结论具有偶然
(4)如图3所示,弹簧测力计在C处由竖直向上逐渐向右倾斜拉动杠杆,仍使杠杆在水平位置保持平衡,则弹簧测力计的示数将变大(选填:变大、变小或保持不变),其原因是动力臂变小.
(5)如图4所示,实验小组选用长1.6m、粗细均匀的一只金属杆,绕O点在竖直平面内自由转动,同时将一个“拉力--位置传感器”竖直作用在杆上,并使杠杆在水平位置始终保持平衡.该传感器显示其拉力F与作用点到O点距离x的变化关系如图5所示.由图可知金属杆重10N.
10.单缸四冲程汽油机的飞轮转速是1800r/min,此汽油机在每秒钟内( )
| A. | 完成120个冲程,做功30次 | B. | 完成60个冲程,做功15次 | ||
| C. | 完成30个冲程,做功15次 | D. | 完成60个冲程,做功30次 |
 如图所示凸透镜的焦距f=10cm.为了让光屏上可接收到一个清晰的倒立、缩小的实像,应将光屏向左移动.实验完毕,小明想继续探究平面镜成像的规律,他应将光具座上的光屏换成完全相同的未点燃的蜡烛,再把凸透镜换成薄玻璃板(玻璃板).
如图所示凸透镜的焦距f=10cm.为了让光屏上可接收到一个清晰的倒立、缩小的实像,应将光屏向左移动.实验完毕,小明想继续探究平面镜成像的规律,他应将光具座上的光屏换成完全相同的未点燃的蜡烛,再把凸透镜换成薄玻璃板(玻璃板).