题目内容
17. 如图所示,滑轮的实质是杠杆.(滑轮重、绳子重和摩擦均不计).
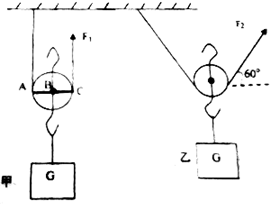
如图所示,滑轮的实质是杠杆.(滑轮重、绳子重和摩擦均不计).(1)按图甲所示竖直向上匀速提升重物G,则哪点是支点?
(2)按图乙所示沿与水平线夹角为60°的方向匀速提升重物G,若物重为90N,根据杠杆平衡条件分析计算拉力F2的大小.
分析 (1)动滑轮的本质是动力臂是阻力臂2倍的杠杆,使用时可以省一半的力,但是不能改变力的方向;
(2)分别作出动力臂和和阻力臂,利用数学知识求出其力臂的大小,根据杠杆平衡条件求出拉力F2的大小即可.
解答 解:(1)按图甲所示竖直向上匀速提升重物时,动滑轮的支点在绳子与边框的接触点上,即A点是支点.
(2)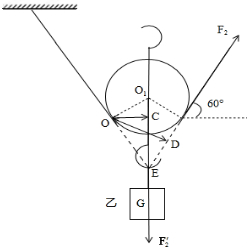
设滑轮的半径为R,过支点O向阻力(即物体对滑轮的拉力等于物重G)作用线作垂线OC,其距离即为阻力臂,
在Rt△O1CO中,∠O1OC=30°,所以O1C=$\frac{1}{2}$O1O=$\frac{1}{2}$R,
则阻力臂LOC=$\sqrt{({O}_{1}O)^{2}-({O}_{1}C)^{2}}$=$\sqrt{{R}^{2}-(\frac{1}{2}R)^{2}}$=$\frac{\sqrt{3}}{2}$R;
在Rt△O1OE中,∠OEO1=30°,所以O1E=2O1O=2R,
则OE=$\sqrt{({O}_{1}E)^{2}-({O}_{1}O)^{2}}$=$\sqrt{(2R)^{2}-{R}^{2}}$=$\sqrt{3}$R,
过支点O向动力F2的作用线作垂线OD,其距离即为动力臂,
在Rt△ODE中,∠DOE=30°,所以DE=$\frac{1}{2}$OE=$\frac{\sqrt{3}}{2}$R,
则动力臂LOD=$\sqrt{(OE)^{2}-(DE)^{2}}$=$\sqrt{(\sqrt{3}R)^{2}-(\frac{\sqrt{3}}{2}R)^{2}}$=$\frac{3}{2}$R;
根据杠杆的平衡条件F1L1=F2L2可得,
F2=$\frac{G{L}_{OC}}{{L}_{OD}}$=$\frac{90N×\frac{\sqrt{3}}{2}R}{\frac{3}{2}R}$=30$\sqrt{3}$N≈51.96N.
答:(1)按图甲所示竖直向上匀速提升重物G,则A点是支点;
(2)拉力F2的大小为51.96N.
点评 本题考查了动滑轮的特点及杠杆的平衡条件的应用,难点是利用直角三角形的有关知识求出动力臂和阻力臂,能正确画出力臂是解答本题的关键,学会利用数学知识来解决物理问题,具有一定的综合性,难度较大.

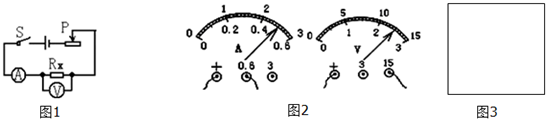
(1)实物元件按照图1电路图连接正确后,闭合开关,将滑片P向右移动时,电压表示数变小(填“变大”、“变小”或“不变”).
(2)实验过程中,某次电流表和电压表的示数如图2所示,此时测得的Rx=5Ω.
(3)完成上述实验后,小明还想测量一段电炉丝的电阻Rx,可是在连接电路时,发现电流表和滑动变阻器都已损坏.于是小明就利用刚才已测得的定值电阻R,重新设计并连接了电路.电源电压未知且恒定不变.
请把设计的电路图画在图3的方框内,写出要测量的物理量R和Rx两端电压UR和Ux.电阻表达式:Rx=Rx=$\frac{{U}_{x}}{{U}_{R}}$×5Ω.
(4)做完实验后,小组同学还想探究小灯泡电阻的有关问题,进行了多次实验数据如下
| 实验次数 | 1 | 2 | 3 | 4 | 5 |
| 电压/V | 0.5 | 1.0 | 1.5 | 2.0 | 2.5 |
| 电流/A | 0.1 | 0.14 | 0.16 | 0.18 | 0.2 |
| A. | 将势能转化为动能 | B. | 将机械能转化为化学能 | ||
| C. | 将内能转化为机械能 | D. | 主要目的是通过热传递改变内能 |
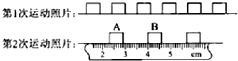 如图所示是同一木块先后两次在同一水平面上运动时所拍摄的“频闪”照片,且第一次运动照片和第二次运动照片的频闪时间间隔均为1s,由图可知,两次实验中木块的速度不相等,木块所受拉力的大小相等.(均选填“相等”或“不相等”)
如图所示是同一木块先后两次在同一水平面上运动时所拍摄的“频闪”照片,且第一次运动照片和第二次运动照片的频闪时间间隔均为1s,由图可知,两次实验中木块的速度不相等,木块所受拉力的大小相等.(均选填“相等”或“不相等”)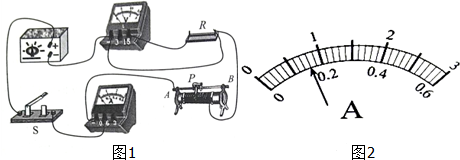
(1)图1是小明连接的实物电路,图中有一根导线连接错误,请你在连接错误的导线上打“×”并补画出正确的连线.
(2)电路连接正确后,闭合开关前,滑片应置于A端.
(3)闭合开关后,移动滑片,使与电阻(20Ω)并联的电压表示数为4V,读出电流表示数,再分别改接15Ω、10Ω的电阻,重复上述实验,收集的实验数据如表1所示.老师告诉小明有一组数据误差较大,便找来一个5Ω的电阻让他再测一组数据.当他把5Ω的电阻接入电路时,要使电压表示数仍为4V,实验不能继续进行,其原因是超过了电流表所选的量程.改变连接后,当电压表示数仍为4V时,电流表示数为0.8A(如图2所示).
综合分析数据可得:电压一定时,导体中的电流跟导体的电阻成反比.
表1
| 电压U/V | 4 | ||
| 电阻R/Ω | 20 | 15 | 10 |
| 电流I/A | 0.20 | 0.28 | 0.40 |
| 电阻R/Ω | 10 | ||||
| 电压U/V | 2 | 3 | 4 | 5 | 6 |
| 电流I/A | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 |
①分析表二中数据可得:电阻一定时,导体中的电流跟导体两端的电压成正比.
②分析可知,小明使用的变阻器的最大阻值至少为20Ω.
小亮的实验是“探究同种物质的质量和体积的关系”,他选择了三个体积不同、质量分别为89g、178g、356g的实心铜块做实验。实验中,他每次都用盛有30cm3水的量筒分别测出了三个铜块的体积,并将数据记录在了自己设计的表格中。
质量m/g | 体积V/cm3 | 比值(m/V) | |
铜块1 | 89 | 10 | |
铜块2 | 178 | 20 | |
铜块3 | 356 | 70 |
(1)铜块1的比值是
(2)小亮在计算质量与提及的比值(m/V)时,发现其中的一个数据测量有错误,这个数据是 (填该数据的数字和他的单位)。
(3)小亮思考了半天也没想出这个错误是怎么产生的,请你帮小亮指出该错误产生的原因: 。