题目内容
6.某实验小组的同学对A、B两根长度相同粗细不同的橡皮筋进行研究,并做成橡皮筋测力计.将橡皮筋的一端固定,另一端悬挂钩码(图甲所示),记录橡皮筋受到的拉力大小F和橡皮筋的伸长量△x,根据多组测量数据做出的图线如图乙所示.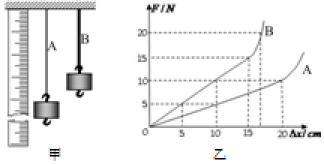
(1)当在两根橡皮筋上都悬挂重力为8N的物体时,橡皮筋A的伸长量为16cm,橡皮筋B的伸长量为8cm;
(2)分别用这两根橡皮筋制成的测力计代替弹簧秤,则用橡皮筋B制成的测力计量程大,用橡皮筋A制成的测力计测量的精确程度高(均选填“A”或“B”);
(3)根据图象信息可知,若将两根A或两根B橡皮筋分别并联使用起来代替弹簧测力计,则能够测量力的最大值为30N.
分析 (1)根据图乙分别找出在一定范围内A、B橡皮筋伸长与受到的拉力的函数关系式,根据函数关系式作答;
(2)根据弹簧则力计的测力原理确定测力范围;根据受同样的力(在测量范围内)伸长量大的,测量精确高;
(3)将本实验中相同的两根橡皮筋并联起来代替弹簧测力计使用时,根据力作用的相互性,求能够测量力的最大值.
解答 解:
(1)由图乙可知,A橡皮筋在受到的拉力不大于10N的情况下,B橡皮筋在受到的拉力不大于15N的情况下,橡皮筋伸长量△x与橡皮筋受到的拉力大小F变化关系为一直线,说明橡皮筋的伸长△x与受到拉力F成正比例函数的关系,FA=kA△xA,FB=kB△xB;
由图知,当FA=5N,△XA=10cm,FB=10N,△XB=10cm,
将上面的数据分别代入FA=kA△xA、FB=kB△xB,得:kA=0.5N/cm、kB=1N/cm,
因此FA=0.5△xA,FB=△xB,
所以,当在两根橡皮筋上悬挂重力为8N的物体时,
橡皮筋A的伸长量为△xA=$\frac{8}{0.5}$cm=16cm,橡皮筋B的伸长量为△xB=$\frac{8}{1}$cm=8cm;
(2)测力计是根据在测量范围内,橡皮筋的伸长与受到的拉力成正比的原理制成的,由图乙知,A的量程为0-10N,B的量程为0-15N,则用橡皮筋 B制成的测力计量程大;
由图乙可知,在测量范围内,如F=5N时,用橡皮筋A制成的测力计伸长10cm,而用橡皮筋B制成的测力计伸长5cm,所以,用橡皮筋A制成的测力测量的精确程度高;
(3)将两根A或两根B橡皮筋分别并联使用起来代替弹簧测力计,B的量程最大,应用两根B橡皮筋并联,每根橡皮筋最大受到15N的拉力,根据力的作用是相互的,两根橡皮筋并联起来的弹簧测力计能够测量力的最大值应为30N.
故答案为:(1)①16;②8;
(2)①B;②A;
(3)30.
点评 本题考查弹簧测力计的原理、测力范围、测量准确程度、合力的知识,体现了数学知识在物理中的应用.

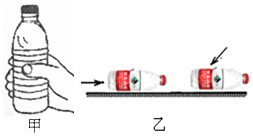 双手挤压矿泉水瓶可以使水溢出瓶口如图甲,这表明力可以改变物体的形状;将空矿泉水瓶放倒在水平桌面上,如图乙,用力向它的侧面吹气它会滚动,但用同样的力向它的底部吹气它却不容易滑动,这表明滚动摩擦力比滑动摩擦力小.
双手挤压矿泉水瓶可以使水溢出瓶口如图甲,这表明力可以改变物体的形状;将空矿泉水瓶放倒在水平桌面上,如图乙,用力向它的侧面吹气它会滚动,但用同样的力向它的底部吹气它却不容易滑动,这表明滚动摩擦力比滑动摩擦力小.

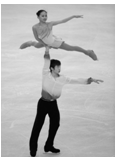 2017年世界花样滑冰锦标赛已于3月29日至4月2日在芬兰顺利举行.如图所示:当质量为75kg的男运动员将质量为50kg的女运动员举起1.0m时,男运动员对女运动员的支持力是500N.如果他们按如图所示的姿势保持了2s,则男运动员对地面的压力是1250N.已知男运动员每只冰鞋的冰刀和冰面的接触面积是10cm2,图中他穿着冰鞋双脚站立在水平冰面时对冰面的压强为6.25×105Pa.
2017年世界花样滑冰锦标赛已于3月29日至4月2日在芬兰顺利举行.如图所示:当质量为75kg的男运动员将质量为50kg的女运动员举起1.0m时,男运动员对女运动员的支持力是500N.如果他们按如图所示的姿势保持了2s,则男运动员对地面的压力是1250N.已知男运动员每只冰鞋的冰刀和冰面的接触面积是10cm2,图中他穿着冰鞋双脚站立在水平冰面时对冰面的压强为6.25×105Pa. 阅读短文,回答文后的问题.
阅读短文,回答文后的问题. 工人用如图所示的滑轮装置,把重为100牛的物体匀速向上提起,在10秒内绳子自由端上升了6米.不计绳子和滑轮之间的摩擦及滑轮重,求:
工人用如图所示的滑轮装置,把重为100牛的物体匀速向上提起,在10秒内绳子自由端上升了6米.不计绳子和滑轮之间的摩擦及滑轮重,求: