题目内容
18.在探究“杠杆的平衡条件”实验中,所用的实验器材有:杠杆:(杠杆上每小格长为2cm)、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个(每个钩码重 lN).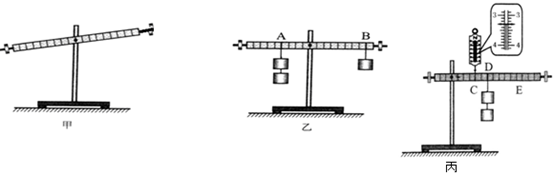
(1)实验前,杠杆静止在如图甲所示的位置,此时杠杆处于平衡(选填“平衡”或“不平衡”)状态.
(2)实验时,使杠杆在水平位置平衡,主要是为了便于测量力臂大小,因此他把杠杆右端的平衡螺母调到最右边,但是杠杆仍然不能水平平衡,接下来他应该把左端的平衡螺母往右调.
(3)杠杆在水平位置平衡后,小明在杠杆A点处挂上2个钩码,作为动力F1,B点处挂上1个钩码,作为阻力F2,杠杆恰好在水平位置平衡,如图乙所示,分别测量出两个力的力臂L1和L2,计算后发现:F1 L1=F2 L2,便得出杠杆的平衡条件是:F1 L1=F2 L2.但小红认为小明这种实验处理方法是不完善的,理由是没有经过多次测量就得出结论,实验没有普遍性.
(4)接着,小明提出新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小明利用如图丙所示装置进行探究,在杠杆D点处挂上2个钩码,用弹簧测力计在C点处竖直向上拉,使杠杆在水平位置处于平衡状态,此时弹簧测力计的示数如图丙所示,则弹簧测力计的拉力是3.3N.以弹簧测力计的拉力为动力F1′,钩码重力为阻力F2′,多次调整力和力臂的大小进行测量,发现:F1′L1′总是大于F2′L2′,其原因主要是受杠杆重力的影响.
(5)小明又把弹簧测力计的作用点固定,只改变测力计与水平方向的角度θ,则能描述测力计示数F与θ关系的图象是图丁中的B

分析 (1)杠杆处于静止状态或匀速转动状态时,杠杆处于平衡状态.
(2)杠杆在水平位置平衡后,支点到力的作用点的距离就是力臂,因此在此实验中我们应首先调节杠杆在水平位置平衡,使杠杆在水平位置平衡的目的是为了便于测量力臂.
(3)在探究性实验中,应进行多次实验,寻找普遍规律,避免结论的偶然性.
(4)弹簧测力计的拉力由图读出;
杠杆在水平位置平衡,力臂在杠杆上,便于测量力臂大小;杠杆的重心过支点,消除杠杆重对杠杆平衡的影响.
(5)根据杠杆的平衡条件动力×动力臂=阻力×阻力臂可知,当阻力和阻力臂不变时,动力臂越大,动力越小.
解答 解:
(1)杠杆静止在如图甲所示位置,杠杆处于静止状态,所以此时杠杆处于平衡状态;
(2)在“探究杠杆的平衡条件”实验中,应先调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,这样做是为了便于测量力臂.
他把杠杆右端的平衡螺母调到最右边,但是杠杆仍然不能水平平衡,接下来他应该把左端的平衡螺母往右调;
(3)小明仅凭一测量就得出杠杆平衡条件,这种实验处理方法是不完善的,因为实验次数过少,会导致实验结论具有偶然性,应该改变动力或阻力的方向进行多次测量,寻找普遍规律,以避免偶然性.
(4)由图可知,弹簧测力计的刻度值为0.1N,指针在3N以下三格处,示数为3.3N.
用如图丙所示装置进行探究,杠杆的重心没有通过支点,杠杆的自重对杠杆平衡有影响.
(5)当测力计和杠杆的角度从0度逐渐增加到90度时,动力臂越来越大,动力越来越小,当测力计和杠杆垂直时,此时动力臂最大,动力最小,当测力计和杠杆的角度从90度逐渐增加到180度时,角度越大,动力臂越小,动力越大.所以B图象符合题意.
故答案为:(1)平衡;(2)水平;力臂;把左端的平衡螺母往右调;(3)没有经过多次测量就得出结论,实验没有普遍性;(4)3.3;杠杆重力;(5)B.
点评 本题考查了探究杠杆平衡条件的实验过程,从原理到实际操作、实验方法、数据分析等,考查较为全面,是我们应该掌握的重点实验.

 浙江名校名师金卷系列答案
浙江名校名师金卷系列答案 全优冲刺100分系列答案
全优冲刺100分系列答案 如图甲所示的电路,闭合开关后,电压表V和V1的指针偏转角度相同,位置均如图乙所示.
如图甲所示的电路,闭合开关后,电压表V和V1的指针偏转角度相同,位置均如图乙所示. 小美同学对某物质加热,她将该物质熔化直到沸腾的过程,绘制成如图所示的温度随时间变化的图象,下列分析正确的是( )
小美同学对某物质加热,她将该物质熔化直到沸腾的过程,绘制成如图所示的温度随时间变化的图象,下列分析正确的是( )| A. | 图象中的DE段是物质的熔化过程 | |
| B. | AB、CD段物质在吸热,BC、DE段物质不吸热 | |
| C. | 图中C点是液态,E点是气态 | |
| D. | 该物质的沸点是100℃ |
 质量不同但体积相同的三个实心小球,A、B、C,两两放入水和酒精中静止时,所处位置如图所示,则三个小球密度大小的关系是( )
质量不同但体积相同的三个实心小球,A、B、C,两两放入水和酒精中静止时,所处位置如图所示,则三个小球密度大小的关系是( )| A. | ρA<ρB=ρC | B. | ρA>ρB=ρC | C. | ρA<ρB<ρc | D. | ρA<ρC<ρB |
 如图所示,小玮想估测大气压的大小,她设计的实验方案如下:
如图所示,小玮想估测大气压的大小,她设计的实验方案如下: