题目内容
7. 如图所示电路,电源电压恒为6V,定值电阻R1为10Ω,滑动变阻器R2的规格为“20Ω 0.5A”,电压表量程为0~3V,电流表量程为0~0.6A.下列说法正确的是( )
如图所示电路,电源电压恒为6V,定值电阻R1为10Ω,滑动变阻器R2的规格为“20Ω 0.5A”,电压表量程为0~3V,电流表量程为0~0.6A.下列说法正确的是( )| A. | 电压表测量的是电阻R1两端的电压 | |
| B. | 当变阻器R2的滑片P向左移动时,电压表的示数变小 | |
| C. | 为了保证电路中各元件安全工作,变阻器R2接入电路的阻值范围是2~10Ω | |
| D. | 当变阻器R2接入电路中的阻值是5Ω时,通电1min电阻R1产生的热量是9.6J |
分析 由各元件规格和特点,根据滑动变阻器的滑片的移动,根据串联分压的特点判断电压表示数的变化;根据电路特点和欧姆定律确定出变阻器的最大值和最小值;根据电功求出产生的热量.
解答 解:A、由电路图可知,电压表是并联在R2两端,测量的是电阻R2两端的电压,故A错误;
B、当变阻器R2的滑片P向左移动时,R2电阻增大,根据串联分压的特点,R2两端电压增大,即电压表示数增大,故B错误;
C、为了保证电路中各元件安全工作,变阻器R2接入电路的阻值范围:
由电压表量程“0~3V”,R2两端电压最大为3V,根据串联分压的特点,$\frac{{U}_{1}}{{R}_{1}}$=$\frac{{U}_{2}}{{R}_{2}}$,$\frac{6V-3V}{10Ω}$=$\frac{3V}{{R}_{2}}$,解得R2=10Ω,
由电流表量程“0~0.6A”,电路中最大电流为0.6A,由滑动变阻器R2的规格为“20Ω 0.5A”,电路中最大电流为0.5A,综合以上因素,电路中最大电流为0.5A,
则I最大=$\frac{U}{{R}_{1}+{R}_{2}}$,0.5A=$\frac{6V}{10Ω+{R}_{2}}$,解得R2=2Ω,故变阻器R2接入电路的阻值范围是2~10Ω,故C正确;
D、当变阻器R2接入电路中的阻值是5Ω时,电路中的电流,I′=$\frac{U}{{R}_{1}+{R}_{2}′}$=$\frac{6V}{10Ω+5Ω}$=0.4A,
通电1min电阻R1产生的热量:Q=I′2R1t=(0.4A)2×5Ω×1×60s=48J,故D错误.
故选C.
点评 此题考查了动态电路的分析及欧姆定律、电功率公式的应用,此题要判断出滑动变阻器的阻值范围,难度较大.

练习册系列答案
相关题目
 如图所示,射水鱼在水中看见水面上A处有一只蜻蜓在飞,请作出喷水鱼在水中吐水击落蜻蜓的路线.
如图所示,射水鱼在水中看见水面上A处有一只蜻蜓在飞,请作出喷水鱼在水中吐水击落蜻蜓的路线.
18.如图所示的现象中,属于光的反射形成的现象是( )
| A. |  绣漪桥在水中的“倒影” | B. |  苹果在桌面上形成影子 | ||
| C. |  用放大镜观察图案 | D. |  筷子好像在水面处向上弯折 |
 在水平桌面上有一个盛有水的容器,木块被细线系住浸没在水中(水未溢出),如图甲.将细线剪断,木块最终漂浮在水面上,且有$\frac{2}{5}$的体积露出水面,如图乙.上述剪断细线后的过程中,水对容器底部的压强变化情况为先不变后减小.甲、乙两图中木块受到水的浮力之比是5:3.此木块的密度为600kg/m3.
在水平桌面上有一个盛有水的容器,木块被细线系住浸没在水中(水未溢出),如图甲.将细线剪断,木块最终漂浮在水面上,且有$\frac{2}{5}$的体积露出水面,如图乙.上述剪断细线后的过程中,水对容器底部的压强变化情况为先不变后减小.甲、乙两图中木块受到水的浮力之比是5:3.此木块的密度为600kg/m3.
2. 南京共享单车以其快捷、环保的优势,备受市民欢迎.下表是摩拜单车的主要技术参数.
南京共享单车以其快捷、环保的优势,备受市民欢迎.下表是摩拜单车的主要技术参数.
(1)若小张骑着该车在水平路面上匀速骑行3km用了10min,求他在此过程中的平均速度.
(2)若小张重500N,他骑该自行车在水平路面上匀速行驶过程中,车对地面的压强多大?
南京共享单车以其快捷、环保的优势,备受市民欢迎.下表是摩拜单车的主要技术参数. | 整车质量 | 20kg |
| 最大载重 | 100kg |
| 每个轮胎与地面的接触面积 | 50cm2 |
(2)若小张重500N,他骑该自行车在水平路面上匀速行驶过程中,车对地面的压强多大?
 如图所示,一束入射光线从水中通过水面后射入空气中,请画出入射光线并标出折射角γ.
如图所示,一束入射光线从水中通过水面后射入空气中,请画出入射光线并标出折射角γ.
19.下列说法正确的是( )
| A. | 家庭电路总电流过大就是发生了短路 | |
| B. | 可以随意靠近高压带电体 | |
| C. | 高于 36V 的电压对人体是安全的 | |
| D. | 中国家庭用电的频率为 50Hz |
16. 阅读短文,回答问题.
阅读短文,回答问题.
扫地机器人 扫地机器人是一款能自动清扫地面的智能家用电器(如图甲所示).
机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其轮子的防滑皮采用凸凹材质制成;底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.
机器人中吸尘电机的吸入功率、风量和真空度是衡量其优劣的重要参数.风量指单位时间内通过吸尘电机排出的空气体积.真空度指主机内部气压与外界的气压差.
下表为某扫地机器人的部分参数.
(1)机器人工作时,主机内部的气压小于(大于/小于/等于)大气压而产生吸力.
(2)下列说法中错误的是D
A.地面有静电时,轻小物体会吸附在地板上而不易清扫
B.当遇到玻璃门等透明障碍物时,使用红外线感应器效果较好
C.机器人工作时发出的声音不会对人的听力造成损伤
D.采用凸凹材质的轮皮,可增大机器人与地面间的摩擦
(3)若风量为0.015m3/s时,10min内通过吸尘电机排出的空气质量为11.7kg.(ρ空气=1.3kg/m3)
(4)光敏电阻是制作灰尘传感器的常用元件.图乙为某光敏电阻的控制电路,电源电压U0恒定,RG为光敏电阻,其阻值随空气透光程度的增大而增大,R0为定值电阻.当光敏电阻分别为6Ω和18Ω时,电压表的示数分别为6V和3V,则R0=6Ω.
(5)为监测空气的透光程度,现将电压表表盘的相关刻度值转化为表示空气中灰尘数目的刻度,则转化后表盘上指针偏转程度越大表示空气中灰尘数目越多(多/少).
阅读短文,回答问题.扫地机器人 扫地机器人是一款能自动清扫地面的智能家用电器(如图甲所示).
机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其轮子的防滑皮采用凸凹材质制成;底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.
机器人中吸尘电机的吸入功率、风量和真空度是衡量其优劣的重要参数.风量指单位时间内通过吸尘电机排出的空气体积.真空度指主机内部气压与外界的气压差.
下表为某扫地机器人的部分参数.
| 额定工作电压 | 12V | 额定功率 | 30W |
| 电池容量 | 2500mAh | 工作噪音 | <50dB |
(2)下列说法中错误的是D
A.地面有静电时,轻小物体会吸附在地板上而不易清扫
B.当遇到玻璃门等透明障碍物时,使用红外线感应器效果较好
C.机器人工作时发出的声音不会对人的听力造成损伤
D.采用凸凹材质的轮皮,可增大机器人与地面间的摩擦
(3)若风量为0.015m3/s时,10min内通过吸尘电机排出的空气质量为11.7kg.(ρ空气=1.3kg/m3)
(4)光敏电阻是制作灰尘传感器的常用元件.图乙为某光敏电阻的控制电路,电源电压U0恒定,RG为光敏电阻,其阻值随空气透光程度的增大而增大,R0为定值电阻.当光敏电阻分别为6Ω和18Ω时,电压表的示数分别为6V和3V,则R0=6Ω.
(5)为监测空气的透光程度,现将电压表表盘的相关刻度值转化为表示空气中灰尘数目的刻度,则转化后表盘上指针偏转程度越大表示空气中灰尘数目越多(多/少).
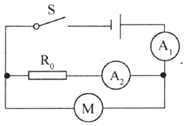 在如图所示电路中,定值电阻R0的阻值为20Ω,电动机线圈电阻为2Ω,闭合开关,电流表A1、A2的示数分别为0.8A和0.3A,则该电路电源电压为6V,1min内电路消耗的电能为288J,电流通过电动机产生的发热功率为0.5W.
在如图所示电路中,定值电阻R0的阻值为20Ω,电动机线圈电阻为2Ω,闭合开关,电流表A1、A2的示数分别为0.8A和0.3A,则该电路电源电压为6V,1min内电路消耗的电能为288J,电流通过电动机产生的发热功率为0.5W.