8. (2009江苏盐城中学高三上学期月考)在同一水平直线上的两位置分别沿同方向抛出两小球和,其运动轨迹如图所示,不计空气阻力.要使两球在空中相遇,则必须( C )
A.甲先抛出球
B.先抛出球
C.同时抛出两球
D.使两球质量相等
7.(2009届湖南省浏阳一中高三10月月考物理试题)由上海飞往美国洛杉矾的飞机在飞越太平洋上空的过程中,如果保持飞行速度的大小不变和距离海平面的高度不变,则以下说法正确的是(C)
A.飞机做的是匀速直线运动
B.飞机上的乘客对座椅的压力略大于地球对乘客的引力
C.飞机上的乘客对座椅的压力略小于地球对乘客的引力
D.飞机上的乘客对座椅的压力为零
6.(2009江苏常州中学月考)在同一点O抛出的三个物体,做平抛运动的轨迹如图所示,则三个体做平抛运动的初速度vA、vB、vC的关系和三个物体做平抛运动的时间tA、tB、tC的关系分别是(.C )
A.vA>vB>vC,tA>tB>tC B.vA=vB=vC,tA=tB=tC
C.vA<vB<vC,tA>tB>tC D.vA>vB>vC,tA<tB<tC
5.(安徽合肥十中2009届高三第二次阶段性考试)质点仅在恒力的作用下,由O点运动到点的轨迹如图所示,在点时速度的方向与x轴平行,则恒力的方向可能沿(D)
A.x轴正方向 B.x轴负方向 C.y轴正方向 D.y轴负方向
4. (湖南湘钢一中2009届10月月考)如图⑴所示,在长约80cm-100cm一端封闭的玻璃管中注满清水,水中放一个用红蜡做成的小圆柱体(小圆柱体恰能在管中匀速上浮),将玻璃管的开口端用胶塞塞紧。然后将玻璃管竖直倒置,在红蜡块匀速上浮的同时使玻璃管紧贴黑板面水平向右匀加速移动,你正对黑板面将看到红蜡块相对于黑板面的移动轨迹可能是下面的:( C)
A. B. C. D.
3.(广东中山龙山中学2009届高三第二次月考)如图所示,足够长的斜面上A点,以水平速度v0抛出一个小球,不计空气阻力,它落到斜面上所用的时间为t1;若将此球改用2v0水平速度抛出,落到斜面上所用时间为t2,则t1 : t2为:(B)
A.1 : 1 B.1 : 2 C.1 : 3 D.1 : 4
2.(广东湛江市2009届高三下学期物理模拟) 铁路转弯处的弯道半径r是根据地形决定的.弯道处要求外轨比内轨高,其内外轨高度差h的设计不仅与r有关,还与火车在弯道上的行驶速率v有关.下列说法正确的是(.AD )
A.v一定时,r越小则要求h越大 B.v一定时,r越大则要求h越大
C.r一定时,v越小则要求h越大 D.r一定时,v越大则要求h越大
2009年曲线运动
选择题
1.(江苏南阳中学2009届高三上学期月考)一物体由静止开始自由下落,一小段时间后突然受一恒定水平向右的风力的影响,但着地前一段时间风突然停止,则其运动的轨迹可能是图中的哪一个?(.C )
11.(05上海23)一水平放置的圆盘绕竖直固定轴转动,在圆盘上沿半径开有一条宽度为2 mm的均匀狭缝.将激
光器与传感器上下对准,使二者间连线与转轴平行,分别置于圆盘的上下两侧,且可以同步地沿圆盘半径方向
匀速移动,激光器连续向下发射激光束.在圆盘转动过程中,当狭缝经过激光器与传感器之间时,传感器接收到
一个激光信号,并将其输入计算机,经处理后画出相应图线.图 (a)为该装置示意图,图(b)为所接收的光信号
随时间变化的图线,横坐标表示时间,纵坐标表示接收到的激光信号强度,图中Δt1=1.0×10-3 s, Δt2=0.8×
10-3 s.
(1)利用图(b)中的数据求1 s时圆盘转动的角速度;
(2)说明激光器和传感器沿半径移动的方向;
(3)求图(b)中第三个激光信号的宽度Δt3;
答案 (1)7.85 rad/s (2)激光器和探测器沿半径由中心向边缘移动 (3)0.67×10-3 s
解析 (1)由图线读得,转盘的转动周期T =0.8 s ①
角速度ω=rad/s =7.85 rad/s ②
(2)激光器和传感器沿半径由中心向边缘移动(理由为:由于脉冲宽度在逐渐变窄,表明光信号能通过狭缝的时间逐渐减少,即圆盘上对应传感器所在位置的线速度逐渐增加,因此激光器和探测器半径由中心向边缘移动).
(3)设狭缝宽度为 d ,传感器接收到第 i个脉冲时距转轴的距离为 ri,第 i 个脉冲的宽度为Δti,激光器和传感器沿半径的运动速度为v.
? Δti= ③
r3 - r 2 = r2 - r1 = vT ④
r2-r1=
r3-r2=
由以上各式解得
=0.67×10-3 s ⑤
10.(05江苏13)A、B两小球同时从距地面高为h=15 m处的同一点抛出,初速度大小均为v0=10 m/s,A球
直向下抛出,B球水平抛出,空气阻力不计,重力加速度取g=10 m/s2.求:
(1)A球经多长时间落地?
(2)A球落地时,A、B两球间的距离是多少?
答案 (1)1 s (2)
解析(1)A球做竖直下抛运动h=v0t+gt2
将h=15 m,v0=10 m/s代入可得t=1 s?
(2)B球做平抛运动x=v0t,y=gt2
将v0=10 m/s、t=1 s代入,可得
x=10 m,y=5 m?
此时A球与B球的距离L=
将x、y、h数据代入得L=10m
 (2009江苏盐城中学高三上学期月考)在同一水平直线上的两位置分别沿同方向抛出两小球
(2009江苏盐城中学高三上学期月考)在同一水平直线上的两位置分别沿同方向抛出两小球 和
和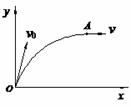 (安徽合肥十中2009届高三第二次阶段性考试)质点仅在恒力
(安徽合肥十中2009届高三第二次阶段性考试)质点仅在恒力 的作用下,由O点运动到
的作用下,由O点运动到 点的轨迹如图所示,在
点的轨迹如图所示,在 A.x轴正方向 B.x轴负方向 C.y轴正方向 D.y轴负方向
A.x轴正方向 B.x轴负方向 C.y轴正方向 D.y轴负方向
 C.r一定时,v越小则要求h越大 D.r一定时,v越大则要求h越大
C.r一定时,v越小则要求h越大 D.r一定时,v越大则要求h越大
 10-3 s.
10-3 s. rad/s
=7.85 rad/s
②
rad/s
=7.85 rad/s
②  ③
③ 

 (2)
(2)
 gt2
gt2 
 m
m