题目内容
【题目】如图所示,气垫导轨上质量为M的滑块通过轻质细绳绕过轻质动滑轮与拉力传感器相连,动滑轮下悬挂质量为m的钩码,滑块上遮光条宽度为d。实验时,滑块由静止释放,测得遮光条通过光电门的时间为Δt,拉力传感器的读数为F。
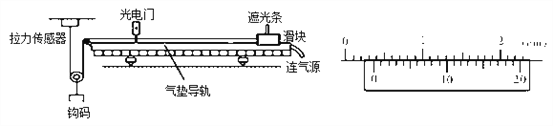
(1)用游标卡尺测量遮光条宽度,其读数为_____ cm;
(2)某同学在“探究绳子拉力对滑块做功与滑块动能变化的关系”实验时,记录滑块的初位置与光电门的距离L及挡光条通过光电门的时间Δt,测得多组L和Δt值。应用图象法处理数据时,为了获得线性图象应作 _________图象(选填“![]() ”、“
”、“ ![]() ”或“
”或“![]() ”),该图象的斜率k=______;
”),该图象的斜率k=______;
(3)该同学通过实验发现:绳子拉力F做的功总大于滑块动能的变化量。若实验数据测量准确,出现该情况的可能原因是______。
A.钩码质量m未远小于滑块质量M
B.滑块运动过程中克服阻力做功
C.气垫导轨没有调节水平
D.没有考虑动滑轮的质量
(4)若用上述装置研究系统(含滑块、钩码)机械能守恒,设滑块由静止开始的释放点与光电门的距离为L、挡光条通过光电门的时间为Δt,则满足关系式_______(用已知量符号表示)时,运动过程中系统机械能守恒。
【答案】 0.355 ![]()
![]() BC
BC ![]()
【解析】(1)用游标卡尺测量遮光条宽度,其读数为:0.3cm+0.05mm×11=0.355 cm;
(2)由动能定理:![]() ,则
,则![]() ,则为了获得线性图象应作
,则为了获得线性图象应作![]() 图像;该图象的斜率
图像;该图象的斜率![]() ;
;
(3)因此实验中应用了力传感器,则不需要钩码质量m远小于滑块质量M,选项A错误;滑块运动过程中克服阻力做功,使得滑块动能的变化量小于绳子拉力F做的功,选项B正确;气垫导轨没有调节水平,滑块要克服重力做功,使得滑块动能的变化量小于绳子拉力F做的功,选项C正确;因此实验中应用了力传感器,则动滑轮的质量对实验无影响,选项D错误;故选BC.
(4)拉力对系统做功:W=![]() mgL;滑块的速度
mgL;滑块的速度![]() ,则钩码的速度为
,则钩码的速度为![]() ;则系统动能的增量:
;则系统动能的增量:![]() ;则若运动过程中系统机械能守恒,则满足关系式:
;则若运动过程中系统机械能守恒,则满足关系式:![]() .
.

【题目】某同学学习了![]() 自由落体运动
自由落体运动![]() 后,想到既然自由落体也是匀变速直线运动,那就可以设计一自由落体运动来测量自由落体加速度
后,想到既然自由落体也是匀变速直线运动,那就可以设计一自由落体运动来测量自由落体加速度![]() 于是和同学合作,按照如图1所示的装置来进行试验.
于是和同学合作,按照如图1所示的装置来进行试验.

1 | 2 | 3 | 4 | 5 | |
|
|
|
|
|
|
|
|
|
|
|
|
![]() 实验室中电火花计器是______仪器.
实验室中电火花计器是______仪器.
![]() 该同学实验时让重物从静止下落,并且测量了第1、2点的间距接近______mm,就可以确保重物做的是自由落体运动.
该同学实验时让重物从静止下落,并且测量了第1、2点的间距接近______mm,就可以确保重物做的是自由落体运动.
![]() 做完实验,选择了一条纸带,并截取了中间某一段,如图2,已知时间间隔为T.则测量C点速度
做完实验,选择了一条纸带,并截取了中间某一段,如图2,已知时间间隔为T.则测量C点速度![]() ______,重力加速度
______,重力加速度![]() ______
______![]() 写表达式
写表达式![]()
![]() 另一同学计算了个其中连续5个点的速度,如下表,请在图3中描绘出该运动的
另一同学计算了个其中连续5个点的速度,如下表,请在图3中描绘出该运动的![]() 图象.通过图象得出重力加速度
图象.通过图象得出重力加速度![]() ______
______![]() ,偏差的原因______.
,偏差的原因______.
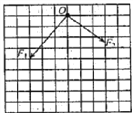
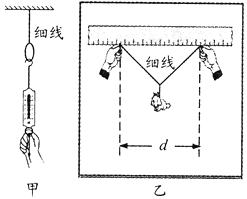
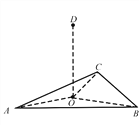
【题目】如图是“探究求合力的方法”实验示意图.将橡皮条的一端固定于A点,图甲表示在两个拉力F1、F2的共同作用下,将橡皮条的结点拉长到O点;图乙表示准备用一个拉力F拉橡皮条,图丙是在白纸上根据实验结果画出的力的合成图示.
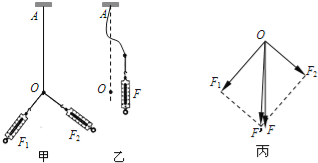
(1)以下实验操作过程中正确的是 ;
A.甲实验时,两个拉力的大小应相等 |
B.甲实验时,两个拉力的方向应互相垂直 |
C.乙实验时,只须使橡皮条的伸长量与甲实验相等 |
D.乙实验时,仍须将橡皮条的结点拉到O点 |
(2)图丙中的F与F′两力中,方向一定沿AO方向的是 .