题目内容
3.下列说法中正确的是( )| A. | 条形磁铁和蹄形磁铁的内部磁感线都是从磁铁的南极到北极 | |
| B. | 直线电流产生的磁场的磁感线是以导线上的点为圆心的一系列同心圆.该圆的平面与导线垂直 | |
| C. | 把安培定则用于通电螺线管时,大拇指所指的方向是螺线管外部磁感线的方向 | |
| D. | 把安培定则用于环形导线时,当右手弯曲的四指和环形电流方向一致时,大拇指所指的方向是环形导线中心轴线上的磁感线方向 |
分析 明确安培定则的基本内容的表述,知道对于直导线、环形电流及螺线管进行判断时的右手大拇指以及四指所指向的内容.
解答 解:A、磁铁外部磁场由北极到南极;而磁铁内部由南极到北极;故A错误;
B、由安培定则可知,直线电流产生的磁场的磁感线是以导线上的点为圆心的一系列同心圆.该圆的平面与导线垂直;故B正确;
C、把安培定则用于通电螺线管时,大拇指所指的方向是螺线管内部磁感线的方向;故C错误;
D、由右手定则可知,把安培定则用于环形导线时,当右手弯曲的四指和环形电流方向一致时,大拇指所指的方向是环形导线中心轴线上的磁感线方向;故D正确;
故选:BD.
点评 本题考查安培定则的应用,要注意明确安培定则的基本内容的三种形式,能正确掌握右手大拇指以及四指的指向.

练习册系列答案
相关题目
14.地球赤道上的物体随地球自转的向心加速度为a1,第一宇宙速度为v1,地球半径为R,同步卫星离地心距离为r,运行速率为v2,向心加速度为a2,则( )
| A. | ${a_1}:{a_2}={r^2}:{R^2}$ | B. | a1:a2=r:R | C. | v1:v2=r:R | D. | ${v_1}:{v_2}=\sqrt{r}:\sqrt{R}$ |
11. 如图所示,表面粗糙的斜面固定于地面上,并处于方向垂直纸面向外、磁感应强度为B的匀强磁场中.质量为m、带电荷量为+Q的小滑块从斜面顶端由静止下滑.在滑块下滑的过程中,下列判断正确的是( )
如图所示,表面粗糙的斜面固定于地面上,并处于方向垂直纸面向外、磁感应强度为B的匀强磁场中.质量为m、带电荷量为+Q的小滑块从斜面顶端由静止下滑.在滑块下滑的过程中,下列判断正确的是( )
如图所示,表面粗糙的斜面固定于地面上,并处于方向垂直纸面向外、磁感应强度为B的匀强磁场中.质量为m、带电荷量为+Q的小滑块从斜面顶端由静止下滑.在滑块下滑的过程中,下列判断正确的是( )| A. | 滑块会一直加速下滑到地面 | |
| B. | B很大时,滑块可能静止于斜面上 | |
| C. | 滑块可能会匀速下滑到地面 | |
| D. | 滑块到达地面时的动能与B的大小无关 |

12.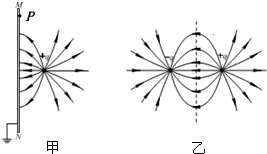 如图所示,图甲中MN为足够大的不带电薄金属板,在金属板的右侧,距离为d的位置O处上放一个电荷量为+q的点电荷,由于静电感应产生了如图甲所示的电场分布.P是金属板上的一点,P点与点电荷之间的距离为r,几位同学想求出P点的电场强度大小,但发现问题很难.几位同学经过仔细研究,从图乙所示的电场得到了一些启示,经过查阅资料他们知道:图甲所示的电场分布与图乙中虚线右侧的电场分布是一样的.图乙中两异号点电荷电荷量的大小均为q,它们之间的距离为2d,虚线是两点电荷连线的中垂线.由此他们分别对P点的电场强度方向和大小做出以下判断,其中正确的是( )
如图所示,图甲中MN为足够大的不带电薄金属板,在金属板的右侧,距离为d的位置O处上放一个电荷量为+q的点电荷,由于静电感应产生了如图甲所示的电场分布.P是金属板上的一点,P点与点电荷之间的距离为r,几位同学想求出P点的电场强度大小,但发现问题很难.几位同学经过仔细研究,从图乙所示的电场得到了一些启示,经过查阅资料他们知道:图甲所示的电场分布与图乙中虚线右侧的电场分布是一样的.图乙中两异号点电荷电荷量的大小均为q,它们之间的距离为2d,虚线是两点电荷连线的中垂线.由此他们分别对P点的电场强度方向和大小做出以下判断,其中正确的是( )
如图所示,图甲中MN为足够大的不带电薄金属板,在金属板的右侧,距离为d的位置O处上放一个电荷量为+q的点电荷,由于静电感应产生了如图甲所示的电场分布.P是金属板上的一点,P点与点电荷之间的距离为r,几位同学想求出P点的电场强度大小,但发现问题很难.几位同学经过仔细研究,从图乙所示的电场得到了一些启示,经过查阅资料他们知道:图甲所示的电场分布与图乙中虚线右侧的电场分布是一样的.图乙中两异号点电荷电荷量的大小均为q,它们之间的距离为2d,虚线是两点电荷连线的中垂线.由此他们分别对P点的电场强度方向和大小做出以下判断,其中正确的是( )| A. | 方向沿P点和点电荷的连线向左,大小为$\frac{2kqd}{{r}^{3}}$ | |
| B. | 方向沿P点和点电荷的连线向左,大小为 $\frac{2kq\sqrt{{r}^{2}-{d}^{2}}}{{r}^{3}}$ | |
| C. | 方向垂直于金属板向左,大小为$\frac{2kqd}{{r}^{3}}$ | |
| D. | 方向垂直于金属板向左,大小为$\frac{2kq\sqrt{{r}^{2}-{d}^{2}}}{{r}^{3}}$ |
9.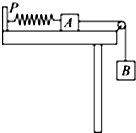 如图所示,轻质弹簧的一端与固定的竖直板P拴接,另一端与物体A相连,物体A静止于光滑水平桌面上,右端接一细线,细线绕过光滑的轻质定滑轮与物体B相连.开始时用手托住B,让细线恰好伸直,然后由静止释放B,直至B获得最大速度.下列有关该过程的分析中正确的是( )
如图所示,轻质弹簧的一端与固定的竖直板P拴接,另一端与物体A相连,物体A静止于光滑水平桌面上,右端接一细线,细线绕过光滑的轻质定滑轮与物体B相连.开始时用手托住B,让细线恰好伸直,然后由静止释放B,直至B获得最大速度.下列有关该过程的分析中正确的是( )
如图所示,轻质弹簧的一端与固定的竖直板P拴接,另一端与物体A相连,物体A静止于光滑水平桌面上,右端接一细线,细线绕过光滑的轻质定滑轮与物体B相连.开始时用手托住B,让细线恰好伸直,然后由静止释放B,直至B获得最大速度.下列有关该过程的分析中正确的是( )| A. | B物体的机械能一直在增大 | |
| B. | B物体的动能的增加量等于它所受重力与拉力做的功之和 | |
| C. | B物体机械能的减少量等于弹簧的弹性势能的增加量 | |
| D. | 细线拉力对A做的功等于A物体与弹簧所组成的系统机械能的增加量 |
10. 北斗导航系统双被称为“双星定位系统”,具有导航,定位等功能,如图所示,北斗导航系统中的两颗工作卫星均绕地心匀速圆周运动,且轨道半径均为r,某时刻工作卫星1、2分别位于轨道上的A、B两个位置,若两卫星均沿顺时针方向运行,地球表面的重力加速度为g,地球半径为R,不计卫星间的相互作用力,下列判断正确的是( )
北斗导航系统双被称为“双星定位系统”,具有导航,定位等功能,如图所示,北斗导航系统中的两颗工作卫星均绕地心匀速圆周运动,且轨道半径均为r,某时刻工作卫星1、2分别位于轨道上的A、B两个位置,若两卫星均沿顺时针方向运行,地球表面的重力加速度为g,地球半径为R,不计卫星间的相互作用力,下列判断正确的是( )
北斗导航系统双被称为“双星定位系统”,具有导航,定位等功能,如图所示,北斗导航系统中的两颗工作卫星均绕地心匀速圆周运动,且轨道半径均为r,某时刻工作卫星1、2分别位于轨道上的A、B两个位置,若两卫星均沿顺时针方向运行,地球表面的重力加速度为g,地球半径为R,不计卫星间的相互作用力,下列判断正确的是( )| A. | 这两颗卫星受到地于对它们的引力大小相等 | |
| B. | 卫星1由A位置运动到B位置所需的时间是$\frac{πr}{3R}$$\sqrt{\frac{r}{g}}$ | |
| C. | 卫星1由A位置运动到B位置的过程中万有引力不做功 | |
| D. | 卫星1向后喷气就一定能够追上卫星2 |