题目内容
15.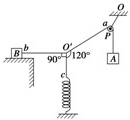 如图所示,A、B都是重物,A被绕过的小滑轮P的细线所悬挂,小滑轮P被一根斜短线系于天花板上的O点.O′是三根线的结点,bO′水平拉着B物体,cO′沿竖直方向拉着弹簧,弹簧、细线、滑轮的重力和细线与滑轮间的摩擦力均可忽略,整个装置处于静止状态.若悬挂小滑轮的细线OP的张力是20$\sqrt{3}$N,则下列说法中正确的是(取g=10m/s2)( )
如图所示,A、B都是重物,A被绕过的小滑轮P的细线所悬挂,小滑轮P被一根斜短线系于天花板上的O点.O′是三根线的结点,bO′水平拉着B物体,cO′沿竖直方向拉着弹簧,弹簧、细线、滑轮的重力和细线与滑轮间的摩擦力均可忽略,整个装置处于静止状态.若悬挂小滑轮的细线OP的张力是20$\sqrt{3}$N,则下列说法中正确的是(取g=10m/s2)( )| A. | 弹簧的弹力为10N | B. | 重物A的质量为2kg | ||
| C. | 桌面对B物体的摩擦力为10$\sqrt{3}$N | D. | OP与竖直方向的夹角为60° |
分析 根据悬挂小滑轮的斜线中的拉力与O′a绳的拉力关系,求出O′a绳的拉力.以结点O′为研究对象,分析受力,根据平衡条件求出弹簧的弹力和绳O′b的拉力.重物A的重力大小等于O′a绳的拉力大小.再根据物体B平衡求出桌面对物体B的摩擦力.
解答 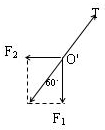 解:A、设悬挂小滑轮的斜线中的拉力与O′a绳的拉力分别为T1和T,则有:2Tcos30°=T1,
解:A、设悬挂小滑轮的斜线中的拉力与O′a绳的拉力分别为T1和T,则有:2Tcos30°=T1,
解得:T=20N.
以结点O′为研究对象,受力如图,根据平衡条件得,弹簧的弹力为F1=Tcos60°=10N.故A正确.
B、重物A的质量mA=$\frac{T}{g}$=2kg.故B正确.
C、绳O′b的拉力F2=Tsin60°=20×$\frac{{\sqrt{3}}}{2}$N=$10\sqrt{3}N$.故C正确.
D、由于动滑轮两侧绳子的拉力大小相等,根据对称性可知,细线OP与竖直方向的夹角为30°.故D错误.
故选:ABC
点评 本题涉及滑轮和结点平衡问题.根据动滑轮不省力的特点,确定细线OP与竖直方向的夹角是关键.

练习册系列答案
相关题目
6.如图甲所示,斜拉桥的塔柱两侧有许多钢索,它们的一端都系在塔柱上.对于每一对钢索,它们的上端可以看成系在一起,即两根钢索对塔柱的拉力F1、F2作用在同一点,它们合起来对塔柱的作用效果应该让塔柱好像受到一个竖直向下的力F一样,如图乙所示.这样,塔柱便能稳固地伫立在桥墩上,不会因钢索的牵拉而发生倾斜,甚至倒下.如果斜拉桥塔柱两侧的钢索不能呈对称分布如图丙所示,要保持塔柱受的合力竖直向下,那么钢索AC、AB的拉力FAC、FAB应满足( )
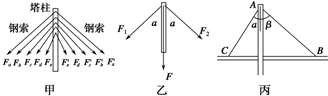
| A. | FAC:FAB=1:1 | B. | FAC:FAB=sin β:sin α | ||
| C. | FAC:FAB=cos β:cos α | D. | FAC:FAB=sin α:sin β |
3.关于静电场的电场线,下列说法正确的是( )
| A. | 电场线是点电荷只在电场力作用下的运动轨迹 | |
| B. | 电场线的切线方向是点电荷只在电场力作用下的加速度方向 | |
| C. | 如果电场线是直线,那么在同一条电场线上各处场强相同,电势不等 | |
| D. | 沿电场线的方向运动的电荷,其动能可能减少 |
 如图所示,放在倾角为30°的斜面上的物体A,被跨过光滑定滑轮的细绳拉住,绳子另一端吊一物体B,已知A的重力为20N,A与斜面间的最大静摩擦力为4N,要使A在斜面上保持静止,则物体B的重力取值范围是6N≤GB≤14N,当B的重力是12N时,A受到的静摩擦力大小为2N,方向沿斜面向下.
如图所示,放在倾角为30°的斜面上的物体A,被跨过光滑定滑轮的细绳拉住,绳子另一端吊一物体B,已知A的重力为20N,A与斜面间的最大静摩擦力为4N,要使A在斜面上保持静止,则物体B的重力取值范围是6N≤GB≤14N,当B的重力是12N时,A受到的静摩擦力大小为2N,方向沿斜面向下.
7.在光电效应实验中,下列表述正确的是( )
| A. | 入射光足够强就可以有光电流 | |
| B. | 光照时间越长光电流越大 | |
| C. | 遏止电压与入射光的频率有关 | |
| D. | 入射光频率大于极限频率才能产生光电子 | |
| E. | 当入射光的频率大于极限频率时,无论入射光怎样若,几乎在照到金属时立即产生光电流 |
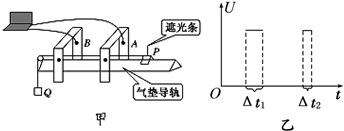
 如图甲所示,一足够长的质量M=0.4kg的长木板静止在水平面上,长木板与水平面间的动摩擦因数μ1=0.1,一质量m=0.4kg的小滑块以v0=1.8m/s的速度从长木板的右端滑上长木板,小滑块刚滑上长木板0.2s内的速度图象如图乙所示,小滑块可看成质点,重力加速度g取10m/s2,求:
如图甲所示,一足够长的质量M=0.4kg的长木板静止在水平面上,长木板与水平面间的动摩擦因数μ1=0.1,一质量m=0.4kg的小滑块以v0=1.8m/s的速度从长木板的右端滑上长木板,小滑块刚滑上长木板0.2s内的速度图象如图乙所示,小滑块可看成质点,重力加速度g取10m/s2,求: