题目内容
9.一根通电直导线水平放置在地球赤道上方,其中通有自东向西的恒定电流,则该导线受到地球磁场的安培力方向为( )| A. | 竖直向上 | B. | 竖直向下 | C. | 水平向南 | D. | 水平向北 |
分析 根据赤道上方地磁场的方向,结合电流方向,与左手定则得出安培力的方向.
解答 解:赤道上方地磁场的方向从南向北,电流的方向自东向西,根据左手定则知,安培力的方向竖直向下.
故选:B.
点评 本题考查了左手定则的基本运用,知道磁场的方向穿过掌心,四指方向与电流方向相同,大拇指所指方向为安培力的方向.

练习册系列答案
 三新快车金牌周周练系列答案
三新快车金牌周周练系列答案
相关题目
19. 如图所示,水平面上放置一斜面,斜面上放一带有U型接收器的物块A,A通过绳子与物块B相连,绳子跨接在一定滑轮上,AB均静止.mA=2kg,mB=1.5kg,A与斜面间的动摩擦因数是0.5,现逐渐向A上的接收器添加沙子.设A与斜面间的最大静摩擦力等于滑动摩檫力,不计绳子与滑轮的摩擦.Sin37°=0.6.则( )
如图所示,水平面上放置一斜面,斜面上放一带有U型接收器的物块A,A通过绳子与物块B相连,绳子跨接在一定滑轮上,AB均静止.mA=2kg,mB=1.5kg,A与斜面间的动摩擦因数是0.5,现逐渐向A上的接收器添加沙子.设A与斜面间的最大静摩擦力等于滑动摩檫力,不计绳子与滑轮的摩擦.Sin37°=0.6.则( )
如图所示,水平面上放置一斜面,斜面上放一带有U型接收器的物块A,A通过绳子与物块B相连,绳子跨接在一定滑轮上,AB均静止.mA=2kg,mB=1.5kg,A与斜面间的动摩擦因数是0.5,现逐渐向A上的接收器添加沙子.设A与斜面间的最大静摩擦力等于滑动摩檫力,不计绳子与滑轮的摩擦.Sin37°=0.6.则( )| A. | 在A滑动前A受到的摩擦力一直增大 | |
| B. | 在A滑动前A受到的摩擦力先减小再增大 | |
| C. | 当向A中添加△m=5.5kg沙子时A将下滑 | |
| D. | 水平面受的摩擦力先向右再向左 |
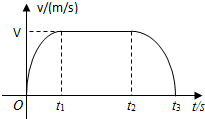 如图所示,质点做直线运动的v-t图象,质点在0-t1时间内质点的速度增大,加速度减小.在t1-t2时间内质点的速度不变,加速度为零.在t2-t3时间内质点的速度减小,加速度增大.(填增大、不变或减小)
如图所示,质点做直线运动的v-t图象,质点在0-t1时间内质点的速度增大,加速度减小.在t1-t2时间内质点的速度不变,加速度为零.在t2-t3时间内质点的速度减小,加速度增大.(填增大、不变或减小)
17.关于光的波粒二象性,下列说法中不正确的是( )
| A. | 能量较大的光子其波动性越显著 | |
| B. | 光波频率越高,粒子性越明显 | |
| C. | 波粒二象性指光有时表现为波动性,有时表现为粒子性 | |
| D. | 个别光子易表现出粒子性,大量光子易表现出显示波动性 |
4.能源在“两型”社会的建设中有着重要的意义,节约用电应成为现代公民的行为准则.下列用电方式中不属于科学、合理地节约用电的是( )
| A. | 离开房间的时候不关灯 | B. | 用节能灯替换白炽灯 | ||
| C. | 楼道、走廊照明灯采用声、光控制 | D. | 定期清除冰箱内的冰、霜 |
1.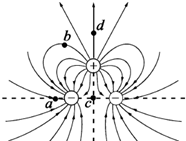 两个相同的负电荷和一个正电荷附近的电场线分布如图所示,c时两负电荷连线的中点,d点在正电荷的正上方,c、d到正电荷的距离相等,则( )
两个相同的负电荷和一个正电荷附近的电场线分布如图所示,c时两负电荷连线的中点,d点在正电荷的正上方,c、d到正电荷的距离相等,则( )
两个相同的负电荷和一个正电荷附近的电场线分布如图所示,c时两负电荷连线的中点,d点在正电荷的正上方,c、d到正电荷的距离相等,则( )| A. | a点的电场强度比b点的大 | B. | c点的电势等于d点的电势 | ||
| C. | c点的电场强度为零 | D. | d点的电势为零 |
18.A、B两车沿同一直线向同一方向运动,A车的速度vA=4m/s,B车的速度vB=10m/s.当B车运动至A车前方7m处时,B车以a=2m/s2的加速度开始刹车,从该时刻开始计时,则A车追上B车所需要时间为( )
| A. | 5s | B. | 6s | C. | 7s | D. | 8s |
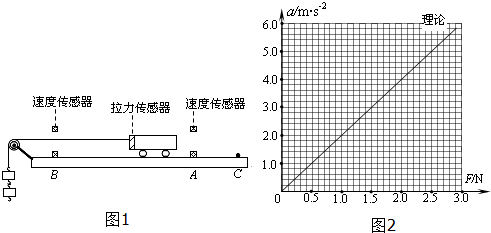
19.现要用如图1所示装置探究“物体的加速度与受力的关系”,小车所受拉力及其速度大小可分别由拉力传感器和速度传感器记录下来.速度传感器安装在距离L=48.0cm的长木板的A、B两点.
①实验主要步骤如下:
A.将拉力传感器固定在小车上;
B.把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
C.接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
D.改变所挂钩码的数量,重复D的操作.
②下表中记录了实验测得的几组数据,vB2-vA2是两个速度传感器记录的速率的平方差,则加速度的表达式a=$\frac{{{v}_{B}^{2}-v}_{A}^{2}}{2L}$.表中的第3次实验数据应该为a=2.44m/s2(结果保留三位有效数字).
③如图2所示的坐标纸上已经绘出了理论上的a-F图象.请根据表中数据,在坐标纸上作出由实验测得的a-F图线.
④对比实验结果与理论计算得到的两个关系图线,分析造成上述偏差的主要原因是没有完全平衡摩擦力或拉力传感器读数偏大.
①实验主要步骤如下:
A.将拉力传感器固定在小车上;
B.把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
C.接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
D.改变所挂钩码的数量,重复D的操作.
②下表中记录了实验测得的几组数据,vB2-vA2是两个速度传感器记录的速率的平方差,则加速度的表达式a=$\frac{{{v}_{B}^{2}-v}_{A}^{2}}{2L}$.表中的第3次实验数据应该为a=2.44m/s2(结果保留三位有效数字).
| 次数 | F(N) | v B 2-v A 2 (m 2/s 2 ) | a(m/s 2 ) |
| 1 | 0.60 | 0.77 | 0.80 |
| 2 | 1.04 | 1.61 | 1.68 |
| 3 | 1.42 | 2.34 | |
| 4 | 2.62 | 4.65 | 4.84 |
| 5 | 3.00 | 5.49 | 5.72 |
④对比实验结果与理论计算得到的两个关系图线,分析造成上述偏差的主要原因是没有完全平衡摩擦力或拉力传感器读数偏大.