题目内容
15. 如图所示,在光滑小滑轮C正下方相距h的A处固定一电量为Q的点电荷,电量为q的带电小球B,用绝缘细线拴着,细线跨过定滑轮,另一端用适当大小的力拉住,使小球处于静止状态,这时小球与A点的距离为R,细线CB与AB垂直.(静电力恒量为k,环境可视为真空),若小球所受的重力的为 G,缓慢拉动细线(始终保持小球平衡)直到小球刚到滑轮的正下方过程中,拉力所做的功为W1,电场力做功为W2,则下列关系式正确的是( )
如图所示,在光滑小滑轮C正下方相距h的A处固定一电量为Q的点电荷,电量为q的带电小球B,用绝缘细线拴着,细线跨过定滑轮,另一端用适当大小的力拉住,使小球处于静止状态,这时小球与A点的距离为R,细线CB与AB垂直.(静电力恒量为k,环境可视为真空),若小球所受的重力的为 G,缓慢拉动细线(始终保持小球平衡)直到小球刚到滑轮的正下方过程中,拉力所做的功为W1,电场力做功为W2,则下列关系式正确的是( )| A. | W1=$\frac{mg}{2h}$(h2-R2) | B. | W2=GR(1-$\frac{R}{h}$) | C. | W1=$\frac{hkQq}{{R}^{2}}$(1-$\frac{R}{h}$) | D. | G=$\frac{khQq}{{R}^{3}}$ |
分析 对小球在B点受力分析正交分解,可求重力大小.缓慢移动过程可视为速度始终为0,原题虽说明末位置在滑轮下方,但并不明确,对小球受力分析后,应用三角形相似可确定末位置.再对移动过程使用动能定理即可求出拉力的功.
解答 解:对小球,在B点时,受力分析如图,力三角形BDE和长度三角形ABC相似.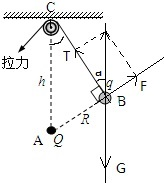
有F=k$\frac{Qq}{{R}^{2}}$,$\frac{h}{R}$=$\frac{G}{F}$
解得 G=$\frac{khQq}{{R}^{3}}$,故D正确;
在缓慢移动的过程中,始终有△BDE∽△ABC,如下图,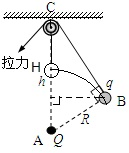
即F、G不变,则边AB、AC长度不变,最终小球停在A点上方距离为R的H处如图
则全过程库仑力F不做功W2=0,故B错误;
全过程由动能定理得
-GR(1-sinα)+W1=0
解得W1=GR(1-$\frac{R}{h}$),又G=$\frac{khQq}{{R}^{3}}$,故也可写成W1=$\frac{hkQq}{{R}^{2}}$(1-$\frac{R}{h}$),故A错误,C正确.
故选:CD
点评 本题考查动能定理、共点力作用下物体的平衡、物体的动态平衡等问题,用到矢量三角形与实物三角形相似的原理,分析力的大小是关键.

练习册系列答案
 阅读快车系列答案
阅读快车系列答案
相关题目
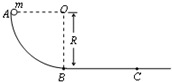 如图所示,AB是竖直平面内的四分之一圆弧轨道,在下端B与水平直轨道相切,一小球自A点由静止开始沿轨道下滑,已知圆轨道半径为R,小球到达B点时的速度为v,则小球在B点受2个力的作用,这几个力的合力的方向是竖直向上,小球在B点的加速度大小为$\frac{{v}^{2}}{R}$,方向是竖直向上.(不计一切阻力)
如图所示,AB是竖直平面内的四分之一圆弧轨道,在下端B与水平直轨道相切,一小球自A点由静止开始沿轨道下滑,已知圆轨道半径为R,小球到达B点时的速度为v,则小球在B点受2个力的作用,这几个力的合力的方向是竖直向上,小球在B点的加速度大小为$\frac{{v}^{2}}{R}$,方向是竖直向上.(不计一切阻力)
6. 如图所示,虚线为匀强电场的等势线,一个带电小球以一定的速度射入该匀强电场后,运动轨迹如图所示,已知小球受到的重力不能忽略,则下列有关说法中正确的是( )
如图所示,虚线为匀强电场的等势线,一个带电小球以一定的速度射入该匀强电场后,运动轨迹如图所示,已知小球受到的重力不能忽略,则下列有关说法中正确的是( )
如图所示,虚线为匀强电场的等势线,一个带电小球以一定的速度射入该匀强电场后,运动轨迹如图所示,已知小球受到的重力不能忽略,则下列有关说法中正确的是( )| A. | 小球在b点的动能一定大于小球在a点的动能 | |
| B. | 若小球从a点向b点运动,则动能和电势能的和一定增加 | |
| C. | 若小球从b点向a点运动,则重力势能和电势能的和一定减小 | |
| D. | 根据图中信息不能确定小球在a、b两点的电势能大小 |
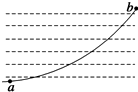
3.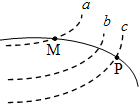 如图所示,虚线a、b、c代表电场中的三个等差等势面,ab的间距大于bc的间距.实线为一带电的粒子仅在电场力作用下通过该区域时的运动轨迹,P、M为轨迹上的两个点,由此可知( )
如图所示,虚线a、b、c代表电场中的三个等差等势面,ab的间距大于bc的间距.实线为一带电的粒子仅在电场力作用下通过该区域时的运动轨迹,P、M为轨迹上的两个点,由此可知( )
如图所示,虚线a、b、c代表电场中的三个等差等势面,ab的间距大于bc的间距.实线为一带电的粒子仅在电场力作用下通过该区域时的运动轨迹,P、M为轨迹上的两个点,由此可知( )| A. | 粒子在M点受到的电场力比在P点受到的电场力大 | |
| B. | 粒子在P、M两点间的运动过程,电场力一定做正功 | |
| C. | 粒子在M点的电势能一定比在P点的电势能大 | |
| D. | 三个等势面中,a的电势一定最高 |

5.在物理学中,常常用比值定义物理量,用来表示研究对象的某种性质,下面列出七个关系式::①场强E=$\frac{F}{q}$ ②电容C=$\frac{Q}{U}$ ③电阻R=$\frac{U}{I}$ ④电流I=$\frac{U}{R}$;⑤电流I=$\frac{Q}{t}$ ⑥R电阻=$\frac{ρl}{S}$⑦电动势E=$\frac{W}{q}$,下列针对这七个关系式说法正确的是( )
| A. | ①②③④属于比值定义式 | B. | ①③⑤⑦属于比值定义式 | ||
| C. | 只有⑥⑦不属于比值定义式 | D. | 全部属于比值定义式 |