题目内容
4. 平行导轨固定在水平桌面上,左侧接有阻值为R的电阻,导体棒ab与导轨垂直且接触良好,ab棒在导轨间的阻值为r,输出功率恒为P的电动机通过水平绳向右拉动ab棒.整个区域存在竖直向上的匀强磁场,若导轨足够长,且不计其电阻和摩擦,则电阻R消耗的最大功率为( )
平行导轨固定在水平桌面上,左侧接有阻值为R的电阻,导体棒ab与导轨垂直且接触良好,ab棒在导轨间的阻值为r,输出功率恒为P的电动机通过水平绳向右拉动ab棒.整个区域存在竖直向上的匀强磁场,若导轨足够长,且不计其电阻和摩擦,则电阻R消耗的最大功率为( )| A. | P | B. | $\frac{R}{R+r}$P | C. | $\frac{r}{R+r}$P | D. | ($\frac{R}{R+r}$)2P |
分析 导体棒在细线的拉力作用下向右加速,随着速度的增加,切割电动势增加,电流增加,安培力增加,最终稳定时导体棒做匀速直线运动,拉力和安培力平衡;拉力做功的功率为P,克服安培力做功的功率等于回路总的电功率,结合P=I2R分析电阻R的电功率.
解答 解:电阻R消耗的电功率最大时,回路的电流最大,导体棒以最大速度做匀速直线运动,受拉力和安培力平衡;
拉力的功率为P,故克服安培力做功的功率也为P;
根据P=I2R,有:$\frac{{P}_{R}}{P}=\frac{R}{R+r}$,故PR=$\frac{R}{R+r}$P,故ACD错误,B正确;
故选:B
点评 本题考查滑杆问题,关键是明确滑杆的受力情况和回路中的功能关系,要知道回路中总的电功率等于克服安培力做功的功率,基础题目.

练习册系列答案
相关题目
8.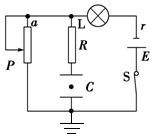 如图所示,电源内阻较大,当开关闭合、滑动变阻器滑片位于某位置时,水平放置的平行板电容器间一带电液滴恰好处于静止状态,灯泡L也能正常发光,现将滑动变阻器滑片由该位置向a端滑动,则( )
如图所示,电源内阻较大,当开关闭合、滑动变阻器滑片位于某位置时,水平放置的平行板电容器间一带电液滴恰好处于静止状态,灯泡L也能正常发光,现将滑动变阻器滑片由该位置向a端滑动,则( )
如图所示,电源内阻较大,当开关闭合、滑动变阻器滑片位于某位置时,水平放置的平行板电容器间一带电液滴恰好处于静止状态,灯泡L也能正常发光,现将滑动变阻器滑片由该位置向a端滑动,则( )| A. | 灯泡将变暗,电源效率将减小 | |
| B. | 液滴带正电,将向下做加速运动 | |
| C. | 电源的路端电压增大,输出功率也增大 | |
| D. | 滑片滑动瞬间,带电液滴电势能将减小 |
9.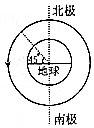 如图所示,某极地轨道卫星的运行轨道平面通过地球的南北两极,已知该卫星从北纬45°的正上方,按图示方向第一次运行到南纬45°的正上方时所用时间为45分钟,则下列说法正确的是( )
如图所示,某极地轨道卫星的运行轨道平面通过地球的南北两极,已知该卫星从北纬45°的正上方,按图示方向第一次运行到南纬45°的正上方时所用时间为45分钟,则下列说法正确的是( )
如图所示,某极地轨道卫星的运行轨道平面通过地球的南北两极,已知该卫星从北纬45°的正上方,按图示方向第一次运行到南纬45°的正上方时所用时间为45分钟,则下列说法正确的是( )| A. | 该卫星的运行速度一定大于7.9km/s | |
| B. | 该卫星与同步卫星的运行半径之比为1:4 | |
| C. | 该卫星与同步卫星的加速度之比为2:1 | |
| D. | 该卫星的机械能一定大于同步卫星的机械能 |
6. 如图示,用一段轻绳系一个质量为m的小球悬挂在天花板下面.将轻绳水平拉直后由静止释放,当绳与水平方向夹角为α时,小球受到的合力大小为( )
如图示,用一段轻绳系一个质量为m的小球悬挂在天花板下面.将轻绳水平拉直后由静止释放,当绳与水平方向夹角为α时,小球受到的合力大小为( )
如图示,用一段轻绳系一个质量为m的小球悬挂在天花板下面.将轻绳水平拉直后由静止释放,当绳与水平方向夹角为α时,小球受到的合力大小为( )| A. | mg$\sqrt{3si{n}^{2}α+1}$ | B. | mg$\sqrt{3si{n}^{2}α-1}$ | C. | mg$\sqrt{2-si{n}^{2}α}$ | D. | mg$\sqrt{4-3si{n}^{2}α}$ |
13.某同学利用电流传感器、电压传感器描绘小灯泡的伏安特性曲线,采用了如图(a)所示的电路.实验中得到了如下一组数据:
(1)图(a)中的矩形框2中接小灯泡,则矩形框1中应接电压传感器,矩形框3中应接电流传感器;(均选填“电流传感器”或“电压传感器”)
(2)在图(b)中画出小灯泡的U-I图线;
(3)若把这个小灯泡与一节电动势E=1.5V、内阻r=3Ω的干电池连接,此时小灯泡的电阻为3.2Ω,实际功率为0.20W.(结果保留2位有效数字)
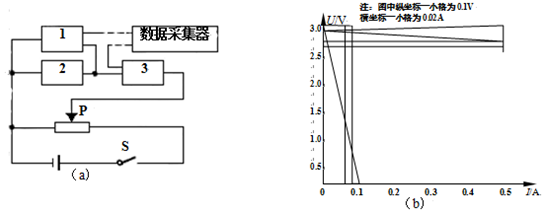
| 电流(A) | 0.00 | 0.10 | 0.20 | 0.30 | 0.36 | 0.39 | 0.41 | 0.43 |
| 电压(V) | 0.00 | 0.20 | 0.50 | 1.00 | 1.50 | 2.00 | 2.50 | 3.00 |
(2)在图(b)中画出小灯泡的U-I图线;
(3)若把这个小灯泡与一节电动势E=1.5V、内阻r=3Ω的干电池连接,此时小灯泡的电阻为3.2Ω,实际功率为0.20W.(结果保留2位有效数字)
 传送带在工农业生产和日常生活中都有广泛的应用,例如在港口用传送带运输货物,在机场上用传送带将地面上的行李传送到飞机上等,如图所示,一质量为m,电阻为R,边长为L的正方形单匝闭合金属线框随水平绝缘传送带以恒定速度v0向右运动,通过一固定的磁感应强度为B,方向垂直于传送带平面向下的匀强磁场区域.已知磁场边界MN、PQ与传送带运动方向垂直,MN与PQ间的距离为d(L<d),线框与传送带间的动摩擦因数为μ,重力加速度为g.金属框穿过磁场的过程中将与传送带产生相对滑动,且右侧边经过边界PQ时又恰好与传送带的速度相同,设传送带足够长,且金属框始终保持右侧边平行于磁场边界.求:
传送带在工农业生产和日常生活中都有广泛的应用,例如在港口用传送带运输货物,在机场上用传送带将地面上的行李传送到飞机上等,如图所示,一质量为m,电阻为R,边长为L的正方形单匝闭合金属线框随水平绝缘传送带以恒定速度v0向右运动,通过一固定的磁感应强度为B,方向垂直于传送带平面向下的匀强磁场区域.已知磁场边界MN、PQ与传送带运动方向垂直,MN与PQ间的距离为d(L<d),线框与传送带间的动摩擦因数为μ,重力加速度为g.金属框穿过磁场的过程中将与传送带产生相对滑动,且右侧边经过边界PQ时又恰好与传送带的速度相同,设传送带足够长,且金属框始终保持右侧边平行于磁场边界.求: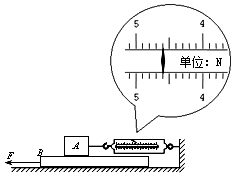 某学习小组测量动摩擦因数,将长木板B置于水平面上,物块A置于B板上,一轻弹簧秤右端固定,左端挂钩与A相连,弹簧秤水平,已知物块A的质量为1kg,当地重力加速度g=9.80m/s2.用水平力F向左拉木板B,使其向左运动,弹簧秤示数的放大情况如图所示,其读数为4.60N,A、B间的动摩擦因数μ=0.47(保留两位有效数字),木板B运动过程中,不需要(填“需要”或“不需要”)匀速直线运动.
某学习小组测量动摩擦因数,将长木板B置于水平面上,物块A置于B板上,一轻弹簧秤右端固定,左端挂钩与A相连,弹簧秤水平,已知物块A的质量为1kg,当地重力加速度g=9.80m/s2.用水平力F向左拉木板B,使其向左运动,弹簧秤示数的放大情况如图所示,其读数为4.60N,A、B间的动摩擦因数μ=0.47(保留两位有效数字),木板B运动过程中,不需要(填“需要”或“不需要”)匀速直线运动.
13. 一悬停在空中的四轴飞行器因故障失去动力,从空中A点自由落下,先后经过B点和C点,不计空气阻力,已知它经过B点时的速度为v,经过C点时的速度为5v,则AB段与BC段位移之比为( )
一悬停在空中的四轴飞行器因故障失去动力,从空中A点自由落下,先后经过B点和C点,不计空气阻力,已知它经过B点时的速度为v,经过C点时的速度为5v,则AB段与BC段位移之比为( )
一悬停在空中的四轴飞行器因故障失去动力,从空中A点自由落下,先后经过B点和C点,不计空气阻力,已知它经过B点时的速度为v,经过C点时的速度为5v,则AB段与BC段位移之比为( )| A. | 1:5 | B. | 1:10 | C. | 1:24 | D. | 1:25 |
 在做“研究平抛物体的运动”实验时:
在做“研究平抛物体的运动”实验时: